初めに
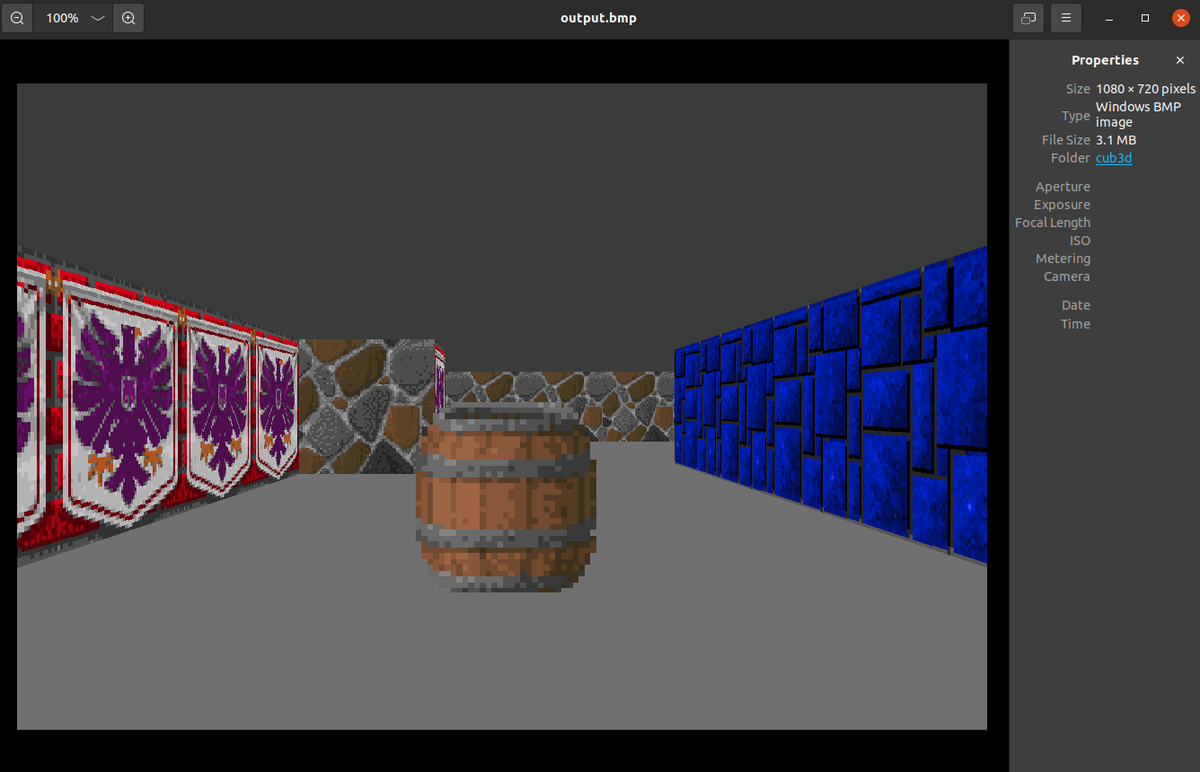
C言語 で3Dゲームを作ったという記事の中で言及した通り, 42のLv2ではレイキャスティングで3Dゲームを作る cub3D と, レイトレーシング プログラムを作る miniRT という課題の2つがあり, 自分は cub3D を選択した.
jun-networks.hatenablog.com
しかし, レイトレーシング もやってみたくなったので, 課題の提出こそしないが, 自分なりにminiRTをやってみた. この記事はその解説記事です.
なお課題の提出はしてないのでこれで合っているかどうかは保証しかねる. 間違いがあればコメントかTwitter , Discordなどで連絡ください.
ではやっていくぞー.
miniRTの概要
具体的なコードやアルゴリズム の説明の前にまずはminiRTの課題の概要から.
miniRT の課題を一言で表すと「C言語 でレイトレーシング プログラムを作りましょう」って感じ.
具体的に満たす必要のある仕様は以下の通りである.
.rt 拡張子のファイル(以降 rtファイル と呼ぶ)を受け取り, そのファイルに記載された設定を元にウィンドウに画像をレンダリング して表示する. (rtファイルについては詳しく後ほど説明する)rtファイルの設定が間違っている場合はエラーメッセージを表示し, プログラムを終了させる.
--save フラグがコマンドライン 引数として与えられた場合はウィンドウを表示する代わりにBMP ファイル形式でレンダリング 結果の画像をファイル出力する.
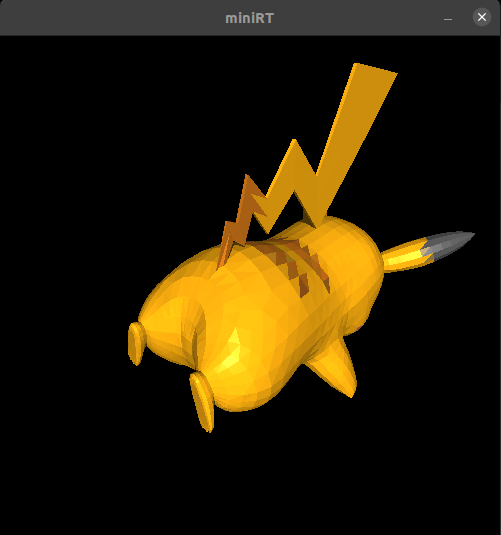
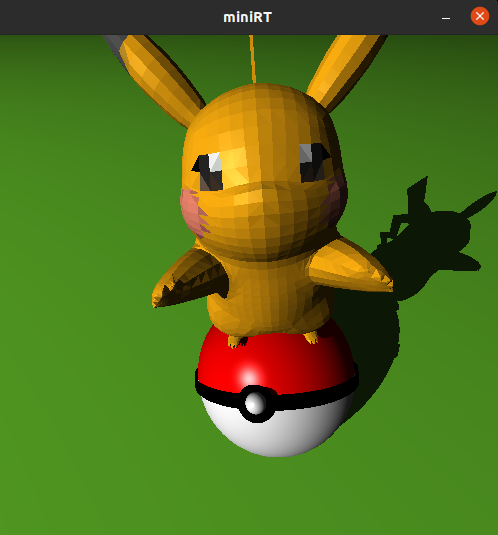
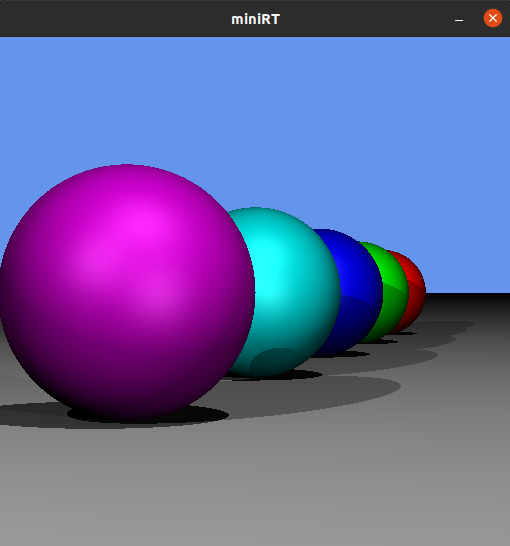
このプログラムのレンダリング 結果のいくつかの例を貼っておこう.
今回の課題で描画する全ての図形が含まれている
all.rt
3Dモデルのファイルから生成したピカチュウ
3Dモデル
玉乗りピカチュウ
rtファイルについて
今回のレイトレーシング プログラムはrtファイルを元にレンダリング を行うわけだが, そのrtファイルのフォーマットは以下のようになっている.
R 1024 800
A 0.1 255,255,255
c 0,3,-20 0,-0.2,1 60
c 20,3,0 -1,0,0 60
c -20,3,0 1,0,0 60
c 0,20,0 0,-1,0 60
c 0,-20,0 0,1,0 60
l 15,15,-15 0.9 255,255,255
pl 0,-4,0 0,1,0 255,255,0
sp 5,0,0 3 255,0,0
tr -3,-5,-3 3,-5,-3 0,5,0 255,255,255
cy -5,-1,0 0,1,0 4 2 0,255,0
sq 0,-2,-3 1,1,-1 3 0,176,176
sq 5,-2,-3 1,-1,1 3 100,0,176
1行が1パラメータとなっており, 形式的には先頭にパラメータの識別子(identifier)が来て, その後空白区切りでパラメータのバリューが入る.
{identifier} {param1} {param2} {param3} ...
以下に各パラメータについての説明を載せておく.
R: 解像度(Resolution)
R は解像度(Resolution)を設定するパラメータである.
R {width} {height}
width: 画面の幅height: 画面の高さ
A: 自然光(Ambient)
A は自然光(Ambient)のパラメータである.
A {lighting_ratio} {rgb}
lighting_ratio: 自然光の光の強さ. 0.0~1.0 の範囲の値.rgb: 自然光の色.
rgb についてはカンマ区切りで 255,255,255 のように指定する. 以降もrgbを受け取るパラメータがあるが, 同じである.
c: カメラ(camera)
c はカメラ(camera)のパラメータである.
c {coordinates_vec} {orientation_vec} {FOV}
coordinates_vec: カメラの座標ベクトル.orientation_vec: カメラの向きベクトル. 各x,y,z成分の大きさは -1.0~1.0 の範囲である.FOV: カメラの視野角(Field Of View ). 単位はdegree.
今回 coordinates_vec や orientation_vec のように_vecのサフィックス が付いたものはベクトルを表す. 形式としては x,y,z のようにカンマ区切りで各成分を書く. この後の説明でも同じ様に _vec サフィックス のついたパラメータの設定項目が出てくるが, それらは全てベクトルを表している.
l: 光源(light)
l は光源(light)のパラメータである.
l {coordinates_vec} {brightness_ratio} {rgb}
coordinates_vec: 光源の座標ベクトル.brightness_ratio: 光源の明るさ. 範囲は 0.0~1.0 .rgb: 光源の色
pl: 平面(plane)
pl は平面(plane)のパラメータである.
pl {coordinates_vec} {orientation_vec} {rgb}
coordinates_vec: 平面の座標ベクトル.orientation_vec: 平面の法線ベクトル.rgb: 平面の色
sp は球(sphere )のパラメータである.
sp {coordinates_vec} {diameter} {rgb}
coordinates_vec: 球の中心座標ベクトルdiameter: 球の直径rgb: 球の色
tr: 三角形平面(triangle)
tr は三角形平面(triangle)のパラメータである.
tr {first_coordinates_vec} {second_coordinates_vec} {third_coordinates_vec}
first_coordinates_vec: 三角形平面の1つ目の頂点の座標ベクトルsecond_coordinates_vec: 三角形平面の2つ目の頂点の座標ベクトルthird_coordinates_vec: 三角形平面の3つ目の頂点の座標ベクトル
cy: 円筒(cylinder)
cy は円筒(cylinder)のパラメータである.
cy {coordinates_vec} {orientation_vec} {diameter} {height} {rgb}
coordinates_vec: 円筒の中心の座標ベクトルorientation_vec: 円筒の向きベクトルdiameter: 円筒の直径height: 円筒の高さrgb: 円筒の色
sq: 四角形平面(sqaure)
sq は四角形平面(sqaure)のパラメータである.
sq {coordinates_vec} {orientation_vec} {side_size} {rgb}
coordinates_vec: 四角形平面の中心の座標ベクトルorientation_vec: 四角形平面の法線ベクトルside_size: 四角形平面の1辺の長さrgb: 四角形平面の色
実際に実装に入る前にまずはレイトレーシング とはなんぞやというのを軽く説明する.
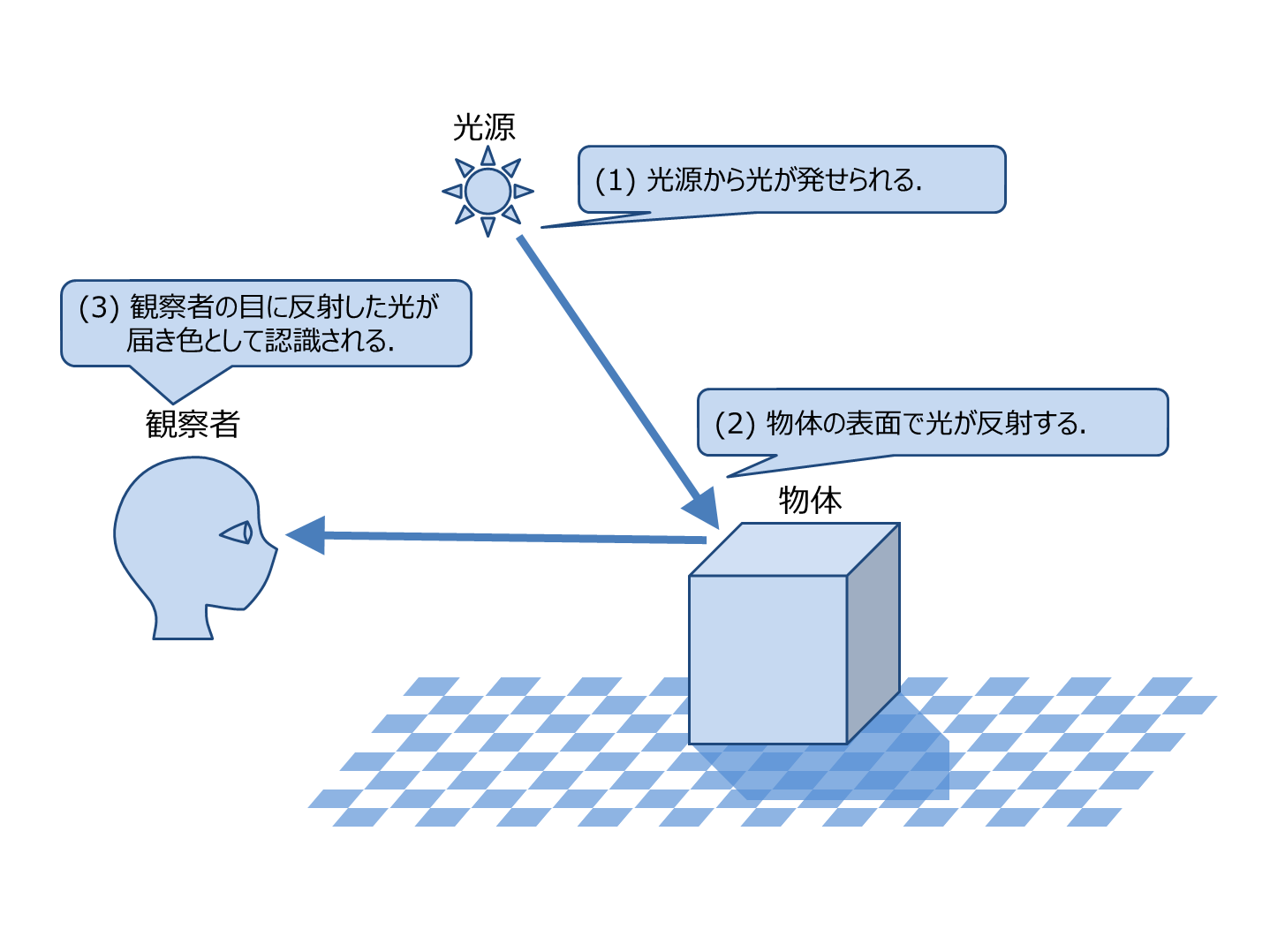
本来我々が物体を見るときには, 光源(太陽や電球)などから発した光が物体に反射し, それが目の網膜に当たり, 視神経を通じて信号として脳に伝達されて物が見える.
The Textbook of RayTracing @TDU
しかし, 光源から発せられる全ての光線を計算するのは計算量が莫大になり不可能です. また, 光源から発せられる光線の中で目に入る光線はごく一部なので, 膨大な量の無駄な計算をすることになってしまいます.
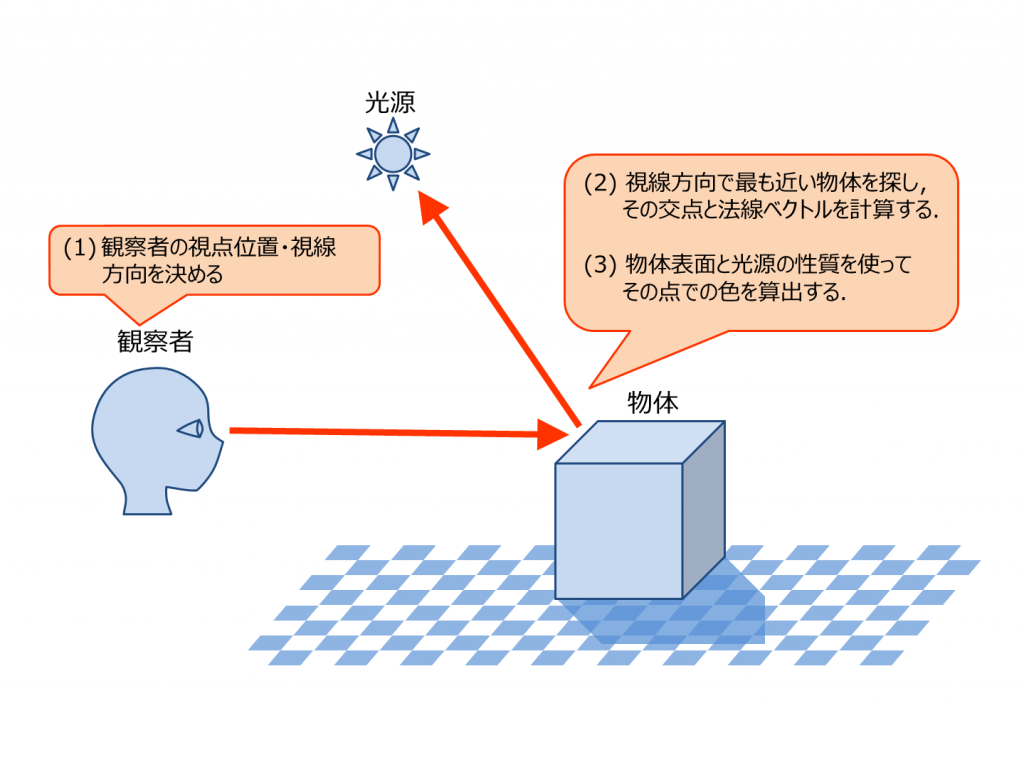
そこで, 光源から発生した光線を計算するのではなく, 逆に視点から光線を飛ばし, 「どのように目から光源まで光線が飛ぶか」をシミュレートする手法を使う. これがレイトレーシング である.
The Textbook of RayTracing @TDU
詳しくは画像の出典元を見てください.
knzw.tech
また, 以下の動画もわかりやすくて良いです. (レイキャスティングの動画ですが)
VIDEO youtu.be
ちなみに, レイトレーシング とレイキャスティングという似たような響きですが, この2つは少し違っていて, 簡単に違いを説明すると,
レイキャスティング: 視点から放った光線がオブジェクト(壁やスプライトなど)に当たるまでの距離を計算し, その距離を元に描画する. 光の屈折や反射などは考えない.
レイトレーシング : 視点から放った光線が光源に達するまで追跡する. その際, オブジェクト(球など)に光線が衝突した場合に発生する反射や屈折なども考慮して追跡し, その結果を元に色を計算し, 描画する. 光線がオブジェクトに衝突しなかった場合には背景色を描画する.
のようになっている.
ちなみに最近のレイトレーシング は本当に凄いので, 一度見てみると良いです.
VIDEO www.youtube.com
こちらのNvidia 公式のRayTracingのの説明動画も良いです.
VIDEO www.youtube.com
実装
じゃあ実際に実装していくわけだが, 実装しやすい順番というのがなんとなくあるので, それを元に実装していく.
実装順としては
プロジェクトで使う構造体とそれに関連した関数の定義
レイの表し方
平面や球との交差判定
位置と向きとFOVが固定されたカメラ
陰影(shading)
影(shadow)
球(sp)
平面(pl)
位置と向きとFOVが可変なカメラ(c)
三角形平面(tr)
四角形平面(sq)
円筒(cy)
というような感じ. 肝となるのは 2~9 でそれ以降のものに関しては 2〜9 で実装したもと共通する部分が多い.
実際のコードは以下のリポジトリ にあります.
github.com
また実装の大筋(2~8)は以下のサイトのアルゴリズム を元に実装しました.
knzw.tech
プロジェクトで使う構造体とそれに関連した関数の定義
ベクトル構造体
C言語 で実装するということで, まずベクトルの情報などを保持する構造体と, ベクトルの演算に関する関数などを作成します.
vec3.h に以下のようにベクトル構造体とベクトル演算に関する関数のプロトタイプ宣言を書きます.
typedef struct s_vec3 {
double x;
double y;
double z;
} t_vec3;
t_vec3 vec3_init(double x, double y, double z);
t_vec3 vec3_add(t_vec3 a, t_vec3 b);
t_vec3 vec3_sub(t_vec3 a, t_vec3 b);
t_vec3 vec3_mult(t_vec3 a, double b);
double vec3_dot(t_vec3 a, t_vec3 b);
t_vec3 vec3_cross(t_vec3 a, t_vec3 b);
double vec3_mag(t_vec3 a);
t_vec3 vec3_normalize(t_vec3 a);
int get_vec3_from_str(t_vec3 *vec, char *str);
上記の関数の具体的な実装は以下から見れます.
github.com
色情報構造体
この先, 色の計算などを行う時にrgbを0~255ではなく0.0~1.0で計算するので, 色情報を保持する構造体と計算関係の関数をminirt.hに作ります.
typedef struct s_fcolor {
double red;
double green;
double blue;
} t_fcolor;
uint32_t fcolor2hex(t_fcolor fcolor);
t_fcolor fcolor_normalize(t_fcolor fcolor);
t_fcolor fcolor_init(double red, double green, double blue);
t_fcolor fcolor_add(t_fcolor a, t_fcolor b);
t_fcolor fcolor_mult(t_fcolor a, t_fcolor b);
t_fcolor fcolor_mult_scalar(t_fcolor a, double b);
int get_fcolor_from_rgbstr(t_fcolor *fcolor, char *rgbstr);
ワールド構造体
プログラム実行中に物体の情報や光源情報などを保持する構造体を作ります.
typedef struct s_world {
void *mlx;
void *win;
int screen_width;
int screen_height;
t_dlist *cameras;
t_list *objects;
t_fcolor ambient;
t_list *lights;
} t_world;
とりあえずこれで実装する準備が出来たので実際に実装していきます.
レイの表し方
ここで説明する内容は東京電機大学の資料 と全く同じというか, 自分は東京電機大学の資料 を見ながら実装したので, この当たりの説明は元資料である東京電機大学の資料 を見た方が良いと思う. ただ, 一応ここでも軽く説明しとく.
まず, 今まで光線 と言ってきたものだが, この先レイ (ray)と呼ぶことにする.
この記事の最初の方で述べたように, レイトレーシング というのは放ったレイを追跡(シミュレート)して目に入ってくる光の色や強さなどを求めるわけだが, とりあえずここでは光の強さや陰影は気にせず, 「放ったレイが物体にぶつかったかどうか」という単純な仕様を満たすことから始める.
ベクトル方程式について
様々な物体との交点を求めたい場合, 球や曲面はベクトルで表すことができ , その物体とレイとの交点を求める場合にはベクトル方程式 を用いると便利である.
ベクトル方程式とは, 等式の中にベクトルが出現する方程式のことである.
もっとも簡単なベクトル方程式は以下のようなものである.
この式は
なお, ベクトル方程式で注意すべきことは, 両辺ともスカラー , もしくはベクトルである式でないと意味を持たないということである.
例えば左辺がベクトル, 右辺がスカラー の以下の式は成立しない.
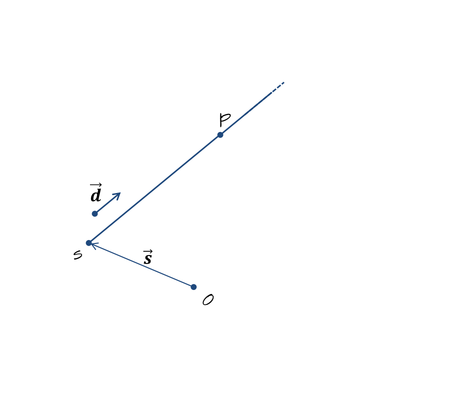
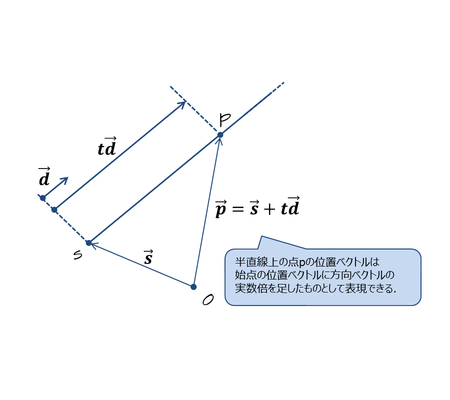
レイ(半直線) の方程式
出典: The Textbook of RayTracing @TDU
レイ(半直線)は直線と似ているが, 直線と違い終点が無い. つまり, 始点からとある方向に無限に伸びる直線である. レイは始点の位置ベクトル
レイの方程式は媒介変数
(添字付きの
ベクトルの方程式で表すと以下のようになる.
(
文章で書けば, 半直線上の点 ということである.
レイのベクトル方程式はこの先頻繁に出てくるので覚えておいてください.
出典: The Textbook of RayTracing @TDU
平面や球との交差判定
レイがベクトル方程式で表せるようになったので, ここから平面と球との交差判定, つまりレイと物体が衝突するかどうか, また衝突した場合の交点はどこかというのを求める.
察しのいい人は気づいているかも知れないが, 平面や球などといった物体も数式として表すことでき, それによって交点の計算が出来る.
平面
原点を通る平面の方程式とレイとの交点の求め方は東京電機大学の資料 に書いてあるので省略.
ここでは任意の座標を通る平面, つまり, 任意の座標と任意の法線ベクトルを持つ平面とレイとの交差判定について説明する.
まず, 任意の座標と任意の法線ベクトルを持つ平面 というのを想像してほしいわけだが, 以下の図の
ここから実際に任意の座標と任意の法線ベクトルを持つ平面とレイとの交差判定について説明していく.
まず, 任意の座標
ここで,
また, 0の添字が付いているものは
ここで平面上の任意の点
つまり, 平面上の任意の点と法線ベクトルの内積 は必ず0になるということである.
上記の式とレイのベクトル方程式で連立方程式 が立てれる.
この式を
解いた
なお,
ちなみに,
球
平面の交差判定の式の導出は完了したので次は球の交差判定の式を導出する.
例によって原点を通る球の方程式とレイとの交点の求め方は東京電機大学の資料 に書いてあるので省略.
ここでは任意の原点を中心とした球とレイとの交点の求め方を求める.
まず, 任意の点
次に, レイのベクトル方程式と, 上記の式の右辺の式を使って連立方程式 を立てて, それを解くとレイの半直線と球との交点を求める式が導ける. (正確には交点までのレイの長さ
レイのベクトル方程式を球のベクトル方程式に代入する(はてなブログ のTex 記法で上手く数式に番号付けれん)
これを二次方程式 と見做して, 以下のようにする
また判別式 [tex : D = B2 - 4AC] の値によって解の個数が変わる.
位置と向きとFOVが固定されたカメラ
ここでは単純化 したカメラ. 具体的には位置と向きとFOVが固定されたカメラを定義し, またどのようにして3D空間を2D空間(スクリーン)に投影するかというのを説明しよう....と思った東京電機大学 と全く同じなので詳しくは以下のサイトを見てくれ.
knzw.tech
レイの定義
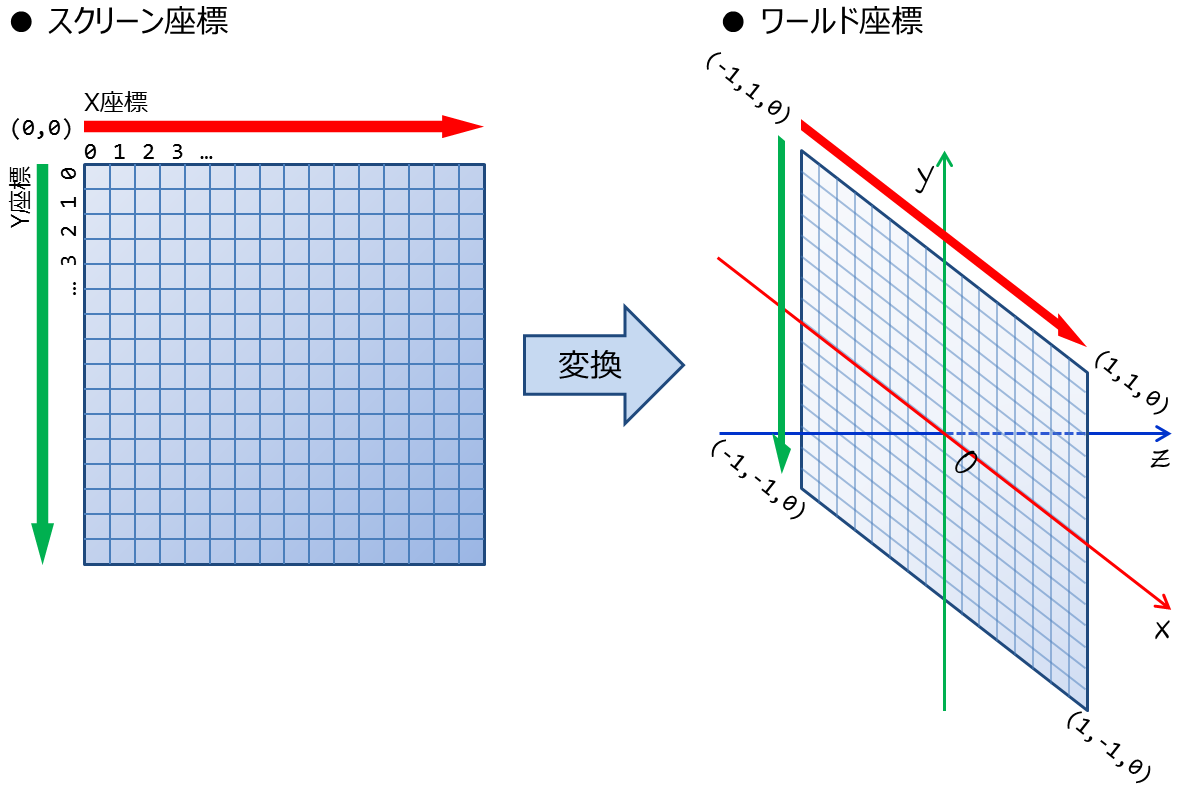
まぁ基本的には以下の2枚の画像がわかってれいればよくて
出典: The Textbook of RayTracing @TDU
この画像はスクリーン座標をワールド空間内で扱いやすいようにx,y座標を[-1.0-1.0]の範囲に正規化するのと, y座標を下向きに定義するという話.
The Textbook of RayTracing @TDU
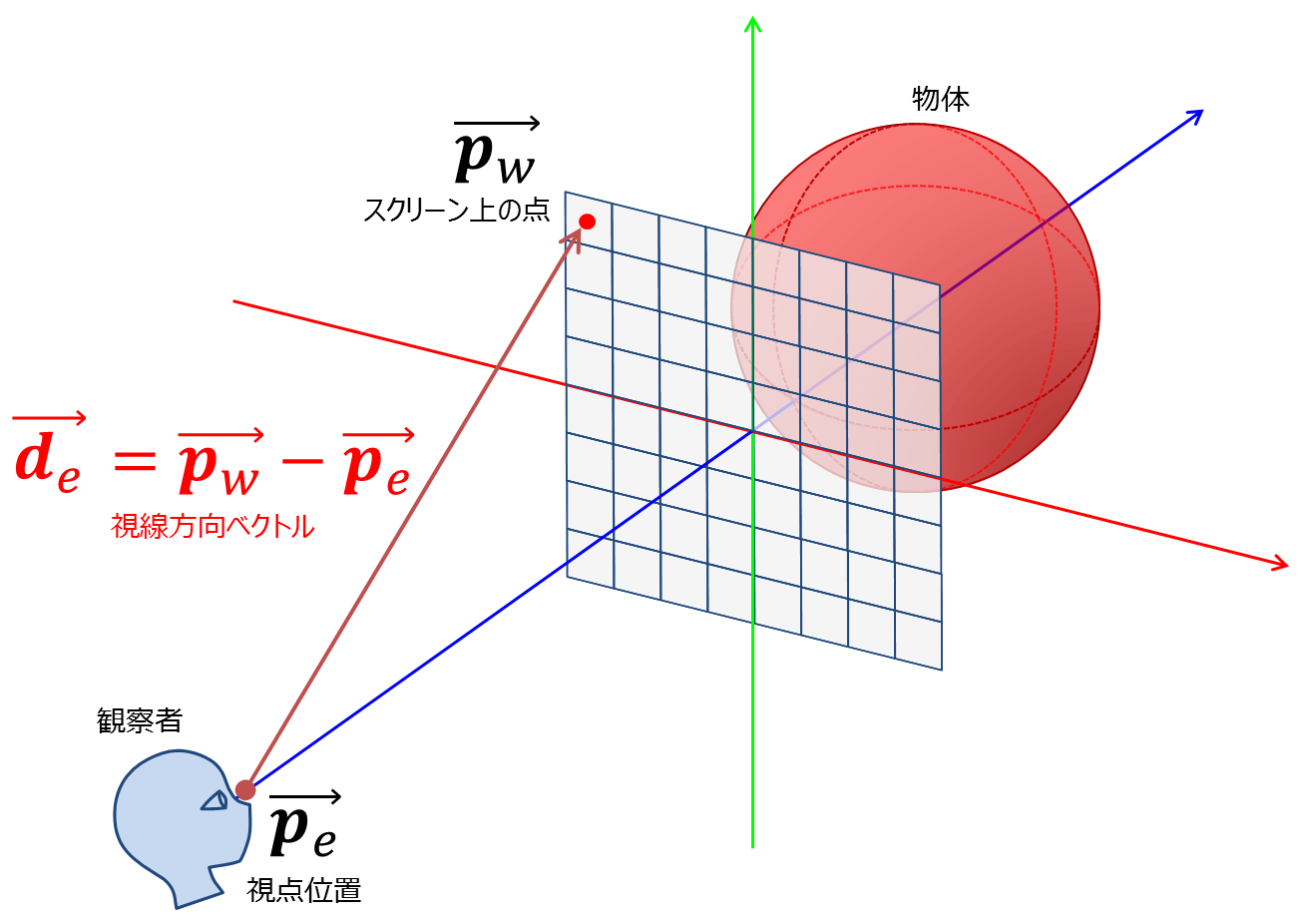
こっちの画像はレイの半直線をどのように定義するかという話. 今回は視点からスクリーン上の点への向きを向きベクトル
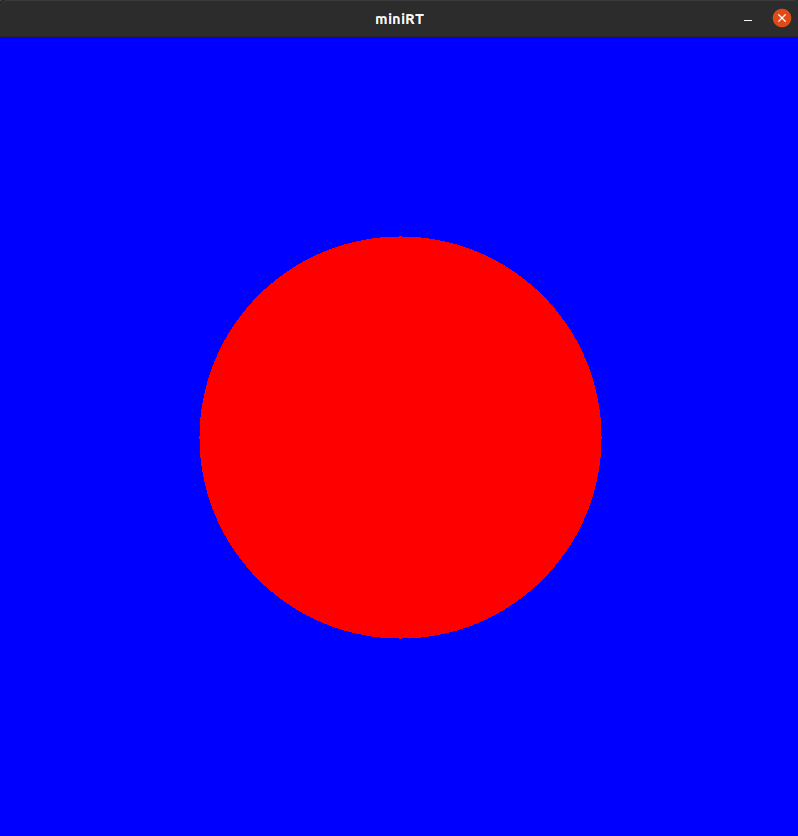
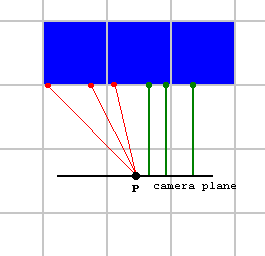
球とレイの交点の描画
ここではレイと球をコードとして表現し, 球との交差判定を実装する. また, 交点があったら画素を赤色にセットし, そうでなければ背景色(青色)をセットすることによって交差判定が正しく動作することを確認する.
物体とカメラの関係は以下の画像のように設定する.
出典: The Textbook of RayTracing @TDU
int raytracing(t_world *world)
{
// 視点位置を表すベクトル
t_vec3 camera_vec;
camera_vec = vec3_init(0, 0, -5); // スクリーンの少し手前な感じ
// 球の中心座標
t_vec3 sphere_vec;
sphere_vec = vec3_init(0, 0, 5); // スクリーンの少し奥な感じ
double sphere_r = 1; // 半径
for (double y = 0; y < world->screen_height; y++){
for (double x = 0; x < world->screen_width; x++){
// スクリーン座標からワールド座標への変換
// x,yは[-1,1]へ変換する
// スクリーン上の点の三次元空間における位置を計算する
t_vec3 screen_vec;
screen_vec = vec3_init(2 * x / world->screen_width - 1.0, 2 * y / world->screen_height - 1.0, 0);
// 方向ベクトル
t_vec3 dir_vec;
dir_vec = vec3_normalize(vec3_sub(screen_vec, camera_vec));
//
t_vec3 camera2sphere_vec = vec3_sub(camera_vec, sphere_vec);
// レイが球に当たったか計算する
double a = vec3_mag(dir_vec) * vec3_mag(dir_vec);
double b = 2 * vec3_dot(camera2sphere_vec, dir_vec);
double c = vec3_dot(camera2sphere_vec, camera2sphere_vec) - sphere_r * sphere_r;
// 判別式
double d = b * b - 4 * a * c;
if (d >= 0)
{
my_mlx_pixel_put(&world->img, x, y, rgb2hex(255, 0, 0));
}
else
{
my_mlx_pixel_put(&world->img, x, y, rgb2hex(0, 0, 255));
}
}
}
return (0);
}
上記コードは今まで説明してきたものをコード化したものである. なお, my_mlx_pixel_put()が謎だと思うが, これは42Tokyoで使うXWindowシステムのラッパーライブラリであるminiilbx 用の関数である. この記事を読んでいる人は「x,yを指定して, そこに指定の色をセットする関数」という認識で十分である.
このコードをコンパイル して実行すると以下のような画像を出力する.
球との交差判定
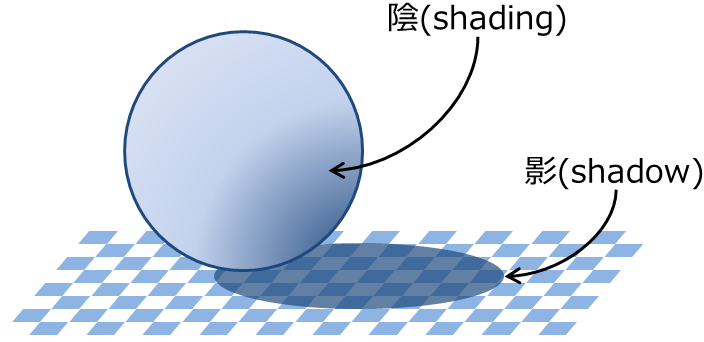
陰影(shading)
前のセクションで球の交差判定を実装し, 正しく描画出来ました. 次に実装するのは陰影(shading)です.
ちなみにこのセクションの内容は例によって東京電機大学の資料 とほぼ同じなので元資料読んだほうがわかりやすいと思います.
まぁそれはそれとして, 陰影とはなんぞやって感じなんですけど, それは以下の画像を見れば大体わかるかなぁと思います.
出典: The Textbook of RayTracing @TDU
光が物体表面に当たることで発生する明暗のコントラ ストみたいな感じかな?
これを実装するためにPhongの反射モデルと呼ばれる手法を使う.
en.wikipedia.org
Phongの反射モデルはWikipedia の説明と以下の東京電機大学の資料 を見ると概要はなんとなくわかると思います.
出典: The Textbook of RayTracing @TDU
Phongの反射モデルでは, 2種類の光源の種類がある.
環境光(Ambient): シーン全体を照らすような光源で, 別の物体表面での反射を経て物体表面に届く光のこと. イメージとしては太陽みたいな感じ.
直接光(light): 電球のようなある場所から光を放つような光源. イメージとしては白熱電球 みたいなイメージ
この光が当たることによって物体表面に陰影が出来る. 物体に当たった光が反射して目に見えるわけだが, Phongの反射モデルではその反射光を以下の3つの要素の総和で近似する.
環境光の環境反射(Ambient)
直接光の拡散反射(Diffuse)
直接光の鏡面反射(Specular)
Brad Smith 投稿者自身による作品 CC 表示-継承 3.0 リンク による
ではここからこの3つの反射現象を扱うわけだが, その前に物体の材質を定義することを忘れてはいけない. 材質と言っても鉄とか木材とかの材料の話ではなく, 光の反射係数のことである.
物体は材質として以下のパラメータを持つ.
自分の実装では以下のような構造体でこれらのパラメータを保持するようにした. (環境光反射係数は1に固定しているので構造体で保持していない)
typedef struct s_material {
t_fcolor kDif;
t_fcolor kSpe;
float shininess;
} t_material;
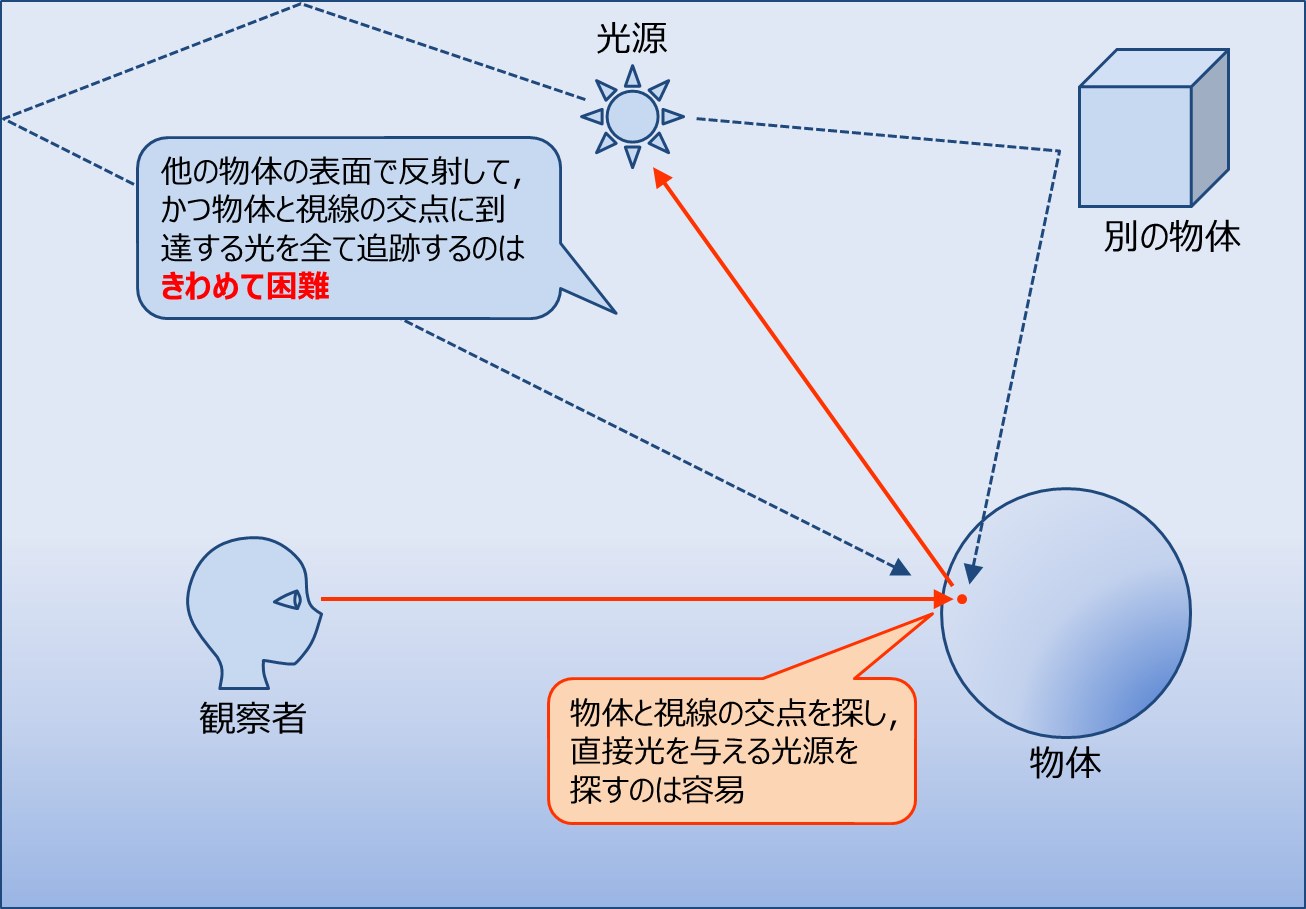
環境光
環境光だが, 直接光以外の光を正確に追跡することは極めて困難であるため定数として処理する.
出典: The Textbook of RayTracing @TDU
式にすると, 環境光の反射輝度
自分の実装では
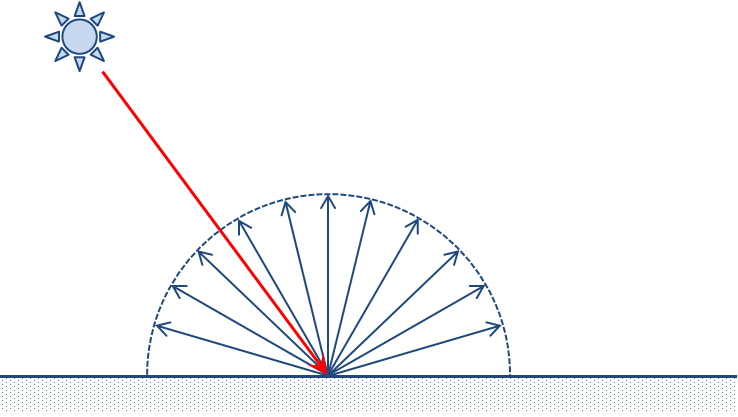
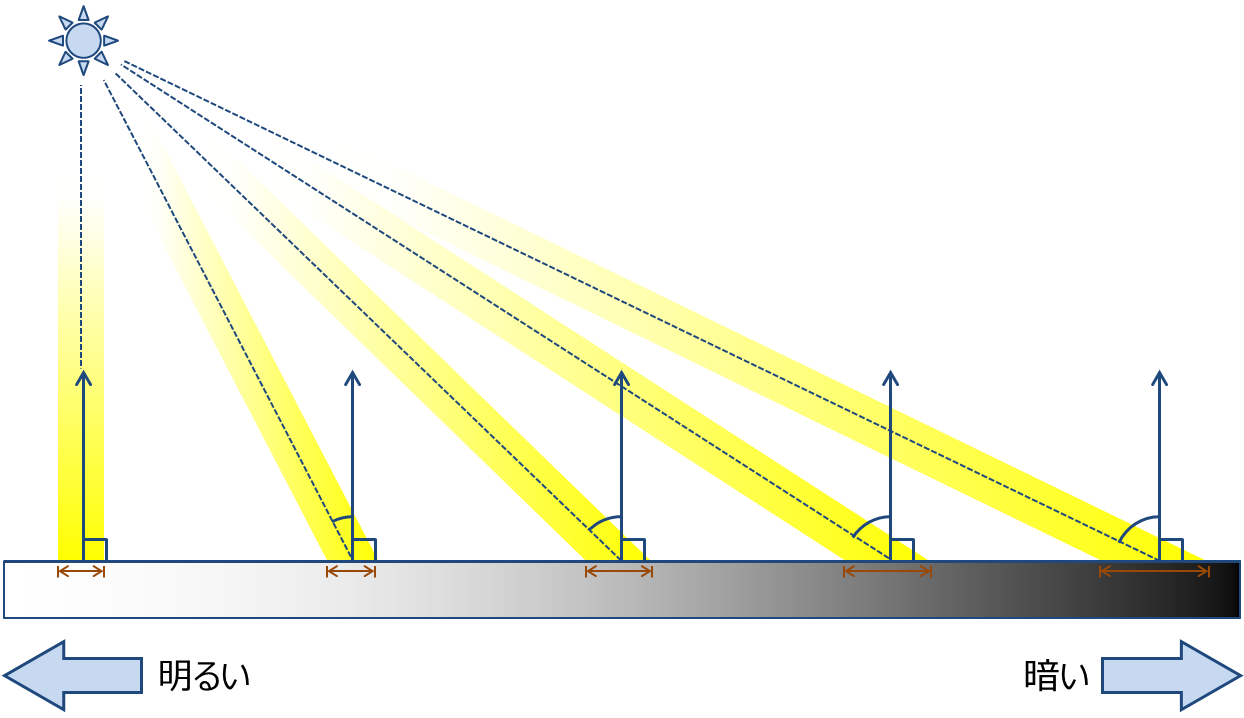
拡散反射光
直接光の拡散反射光は, 光が物体表面で入射点からあらゆる方向に錯乱する現象である(乱反射とも言う). 拡散反射光は全包囲に広がるため, 理想的な拡散反射では反射した光の強さは観測者の視点位置に依らない .
出典: The Textbook of RayTracing @TDU
反射光の光の強さはランベルトの余弦 則(Lambert's cosine law)に従うことが知られている.
ランベルトの余弦 則: 理想的な拡散反射面や拡散放射体で観測される放射強度あるいは光度が, 入射光と面の法線との間の角度θの余弦 (cos)と正比例する ことを示す法則.
ja.wikipedia.org
出典: The Textbook of RayTracing @TDU
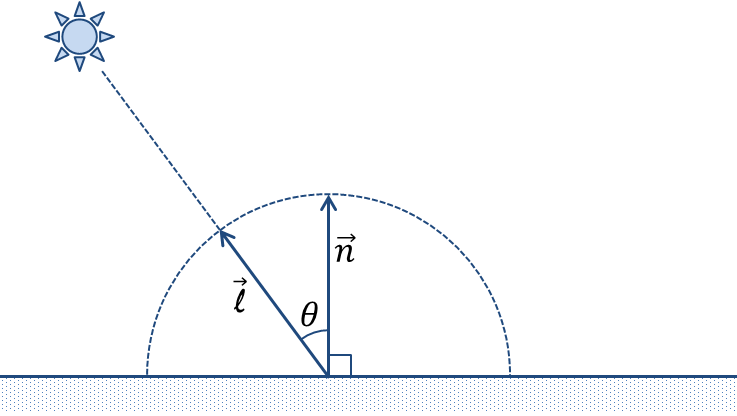
この法則に従えば
ここで,
出典: The Textbook of RayTracing @TDU
ここでなぜ角度が 内積 の定義を思い出して欲しい.
(まぁこの辺の導出は東京電機大学の資料 に詳しい導出とか載ってるのでわからない人はそっち見てください)
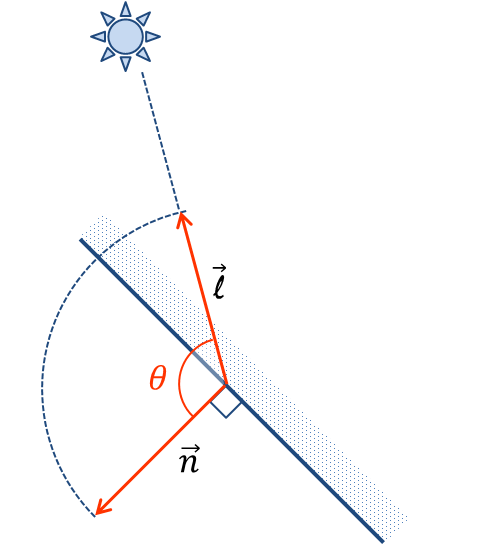
また, 法線ベクトルと入射ベクトルのなす各が90°(
実装では
出典: The Textbook of RayTracing @TDU
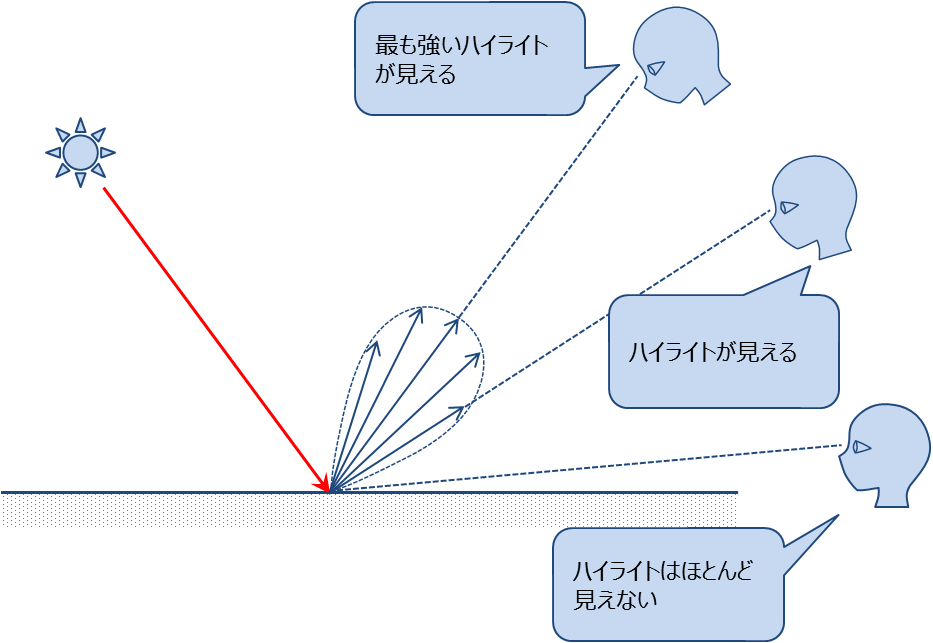
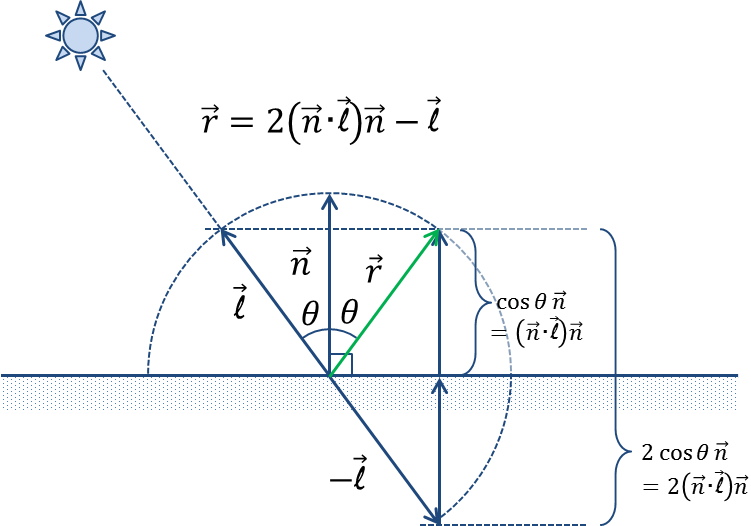
鏡面反射光
次に鏡面反射について説明する.
そもそも鏡面反射とは金属やプラスチックなどのなめらかな表面で起こる反射である. このような表面では光源に近い部分に明るい部分(ハイライト)が見える.
鏡面反射 ‐ 通信用語の基礎知識
理想的な鏡面では, 光は入射角の正反射方向にのみ反射するけど, 現実は正反射方向にを中心とした範囲に反射光は広がる. また, 鏡面反射光は拡散反射光と違い全ての方向に同じ様に反射(乱反射)しないので, 鏡面反射光の強さは視点に依存して変化する .
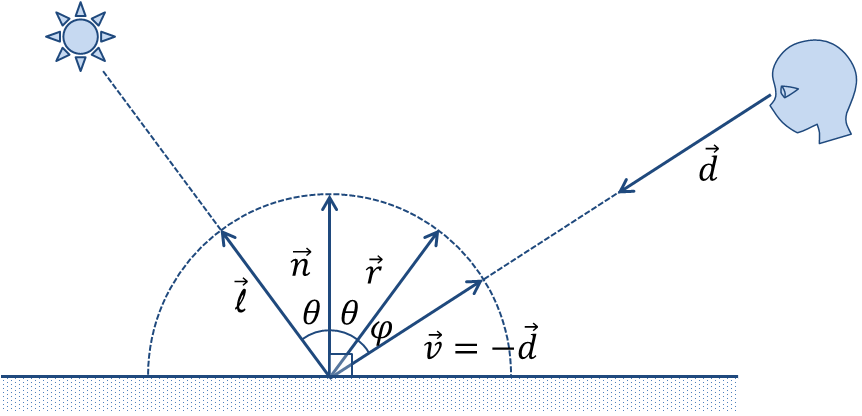
Phongの反射モデルでは鏡面反射光の放射強度
ここで,
この式では
また,
Chapter5. 陰を付ける | The Textbook of RayTracing @TDU
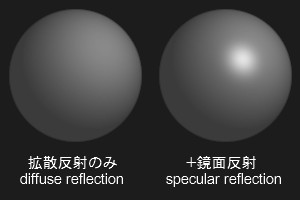
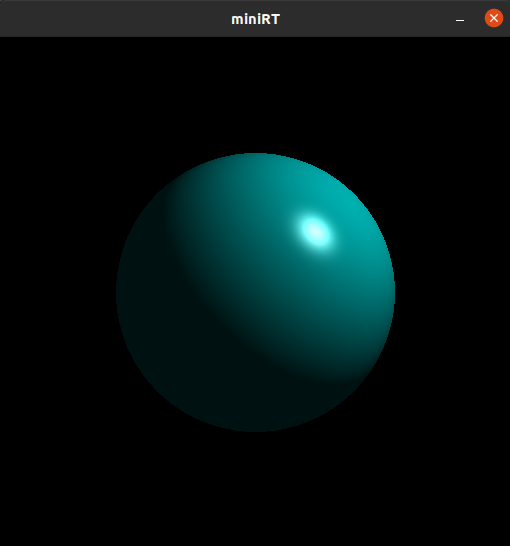
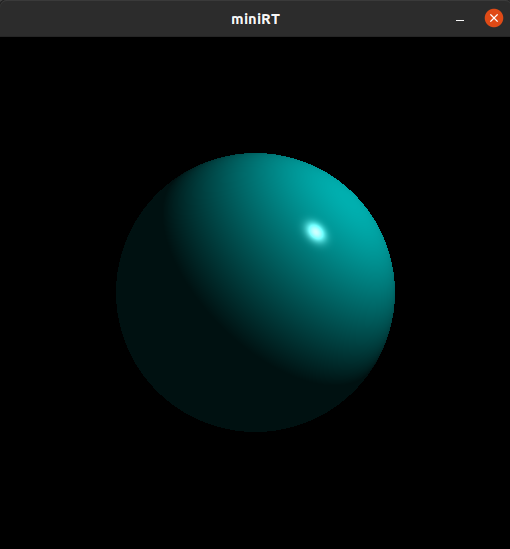
自分の実装で例を見せると
左:
拡散反射光と同じ様に, 法線ベクトルと入射ベクトルの成す角が
また, 視線ベクトルの逆ベクトル
なお正反射ベクトル
Chapter5. 陰を付ける | The Textbook of RayTracing @TDU
実装について
ここまでで陰影にを構成する環境反射光, 拡散反射光, 鏡面反射光を見てきたが, 定数として扱う環境反射光を除き, 光の強さを求めるためには光源からの入射光ベクトルとレイのベクトル, そして物体上の点における法線ベクトルの3つの要素が必ず必要なことがわかったと思う.
入射光ベクトルは直接光が保持しているので問題ない. また, レイのベクトルも既に求め方を表した. 残りの物体上の点における法線ベクトルだが, これは各物体の交点ごとに求める必要がある.
つまり, 語弊を恐れずに言えば物体の交点の法線ベクトルを求めればどのような物体でも陰影が求められるということです.
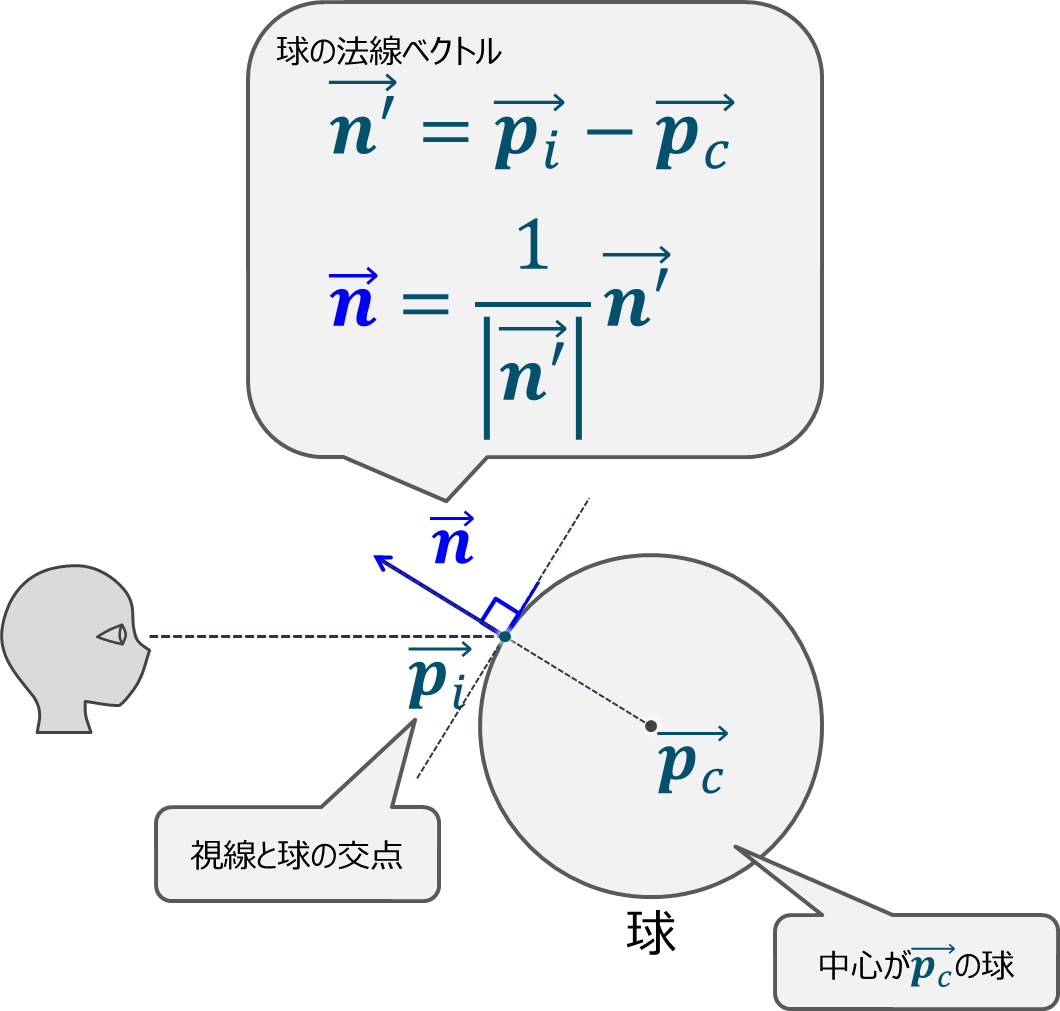
球
球の陰影を求める方法を考えてみます.
レイと球との交点における法線ベクトルを求めれば今まで見せた反射光の式に当てはめるだけで光の強さが出てきます.
なので, ここでは球のある点における法線ベクトル
球の法線ベクトルは球の中心ベクトル
Chapter5. 陰を付ける | The Textbook of RayTracing @TDU
平面
平面は最初から法線ベクトルが定義されているのでそれを使えば陰影が求められます.
ここまでの実装すると以下のような画像が生成出来るようになります.
コミットにチェックアウトして実行しただけなのでちょっとバグあるけど概ねこんな感じになります. (コミットハッシュ: 9379031)
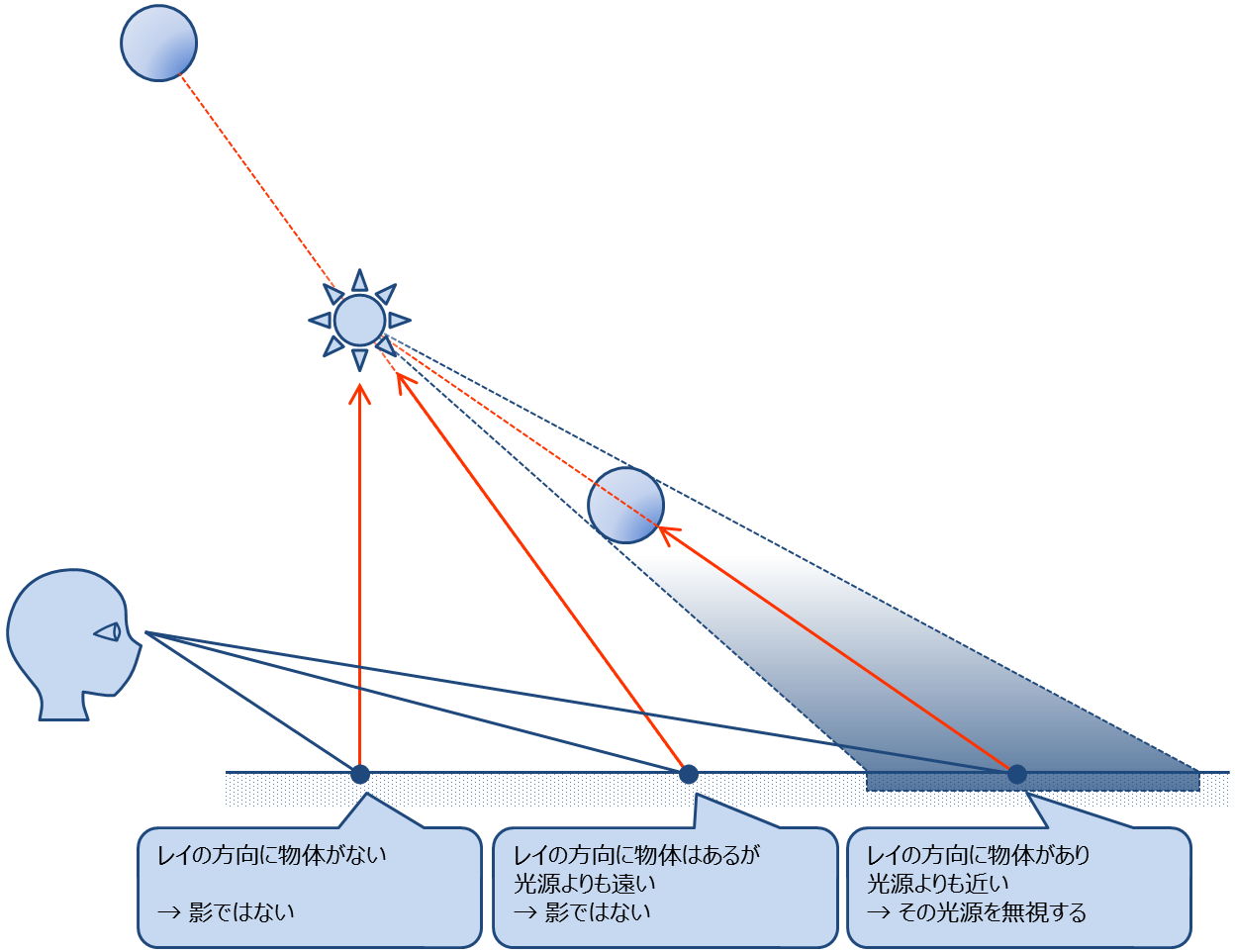
影(shadow)
陰影は計算出来るようになったので次は影の計算を計算出来るようにします.
影はどのように計算するかというと, 物体とレイの交点 と 光源 の間に別の物体があれば影になります. これだけです.
交点と光源の間に物体があるかどうかは 交点を始点
交点を始点とするシャドウレイ
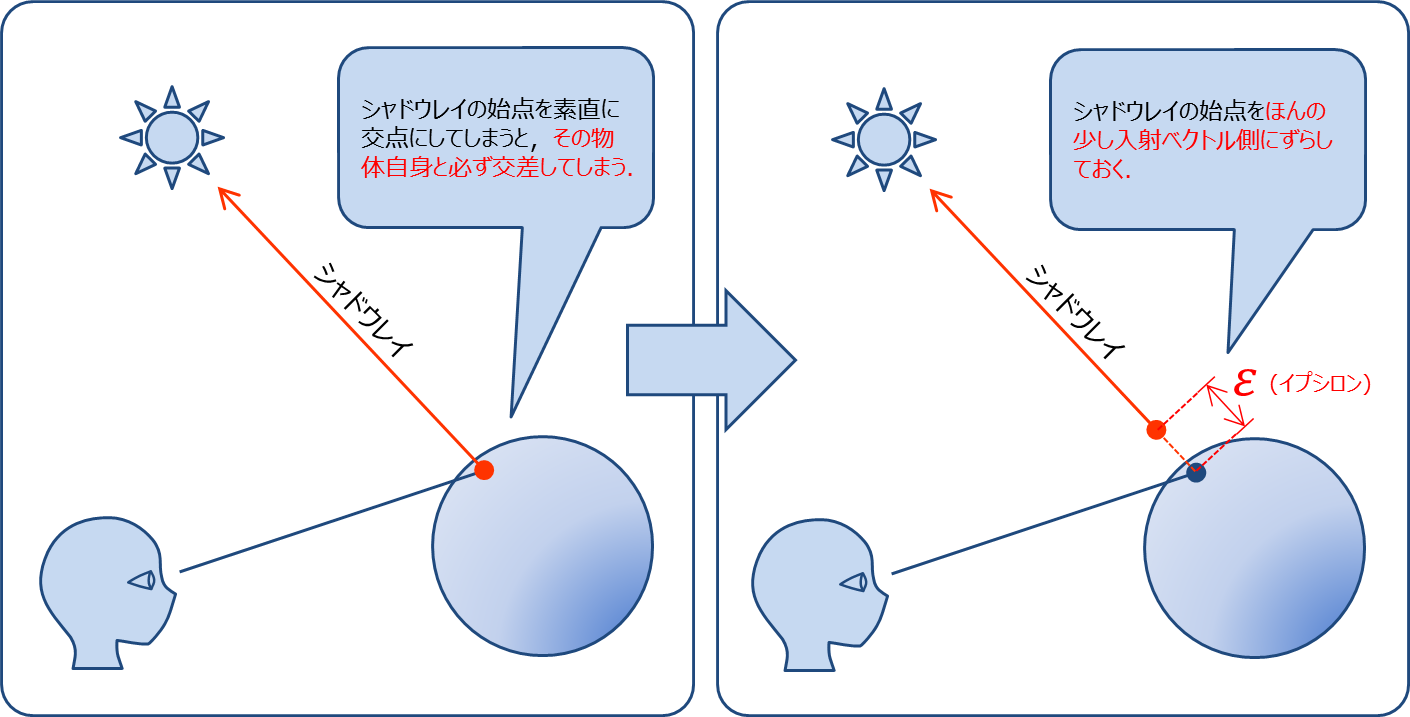
注意
シャドウレイの始点を愚直に実装すると始点が自分自身と交差してしまうので, 微小距離
従ってシャドウレイは以下のようになる
- 始点:
ここで微小距離
ここまで実装すれば以下のような画像が生成出来るようになる. (コミットハッシュ: 8c64c73)
球(sp)
ここまでの実装で球を描画出来る様になっている.
平面(pl)
ここまでの実装で平面を描画出来る様になっている.
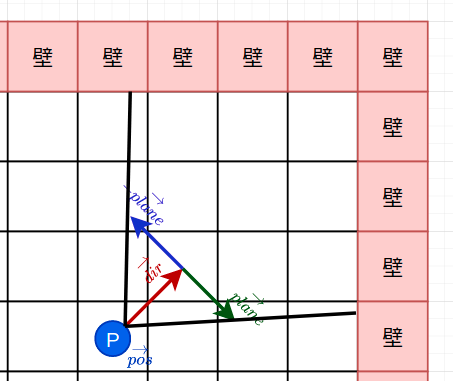
位置と向きとFOVが可変なカメラ(c)
ここから先は東京電機大学の資料 には載っていないので手書きの図と共に説明していく.
今までのカメラは以下の図のように位置,向き,FOV(視野角)が固定されたものだった.
Chapter4. 最初の実装 | The Textbook of RayTracing @TDU
現在の実装ではカメラの向きやFOVが変わった際に上手く動作しないので, 位置,向き,FOVが変更可能なカメラについてここでは説明する.
まず実際に詳しい説明に入る前に, 位置,向き,FOVが変更可能なカメラを機能させるために何をする必要があるのか大まかに書く
任意のFOVのためにカメラとスクリーンの距離
ワールド座標からスクリーン座標へ変換するために, スクリーン座標の正規直交基底ベクトル
ではやっていくぞー.
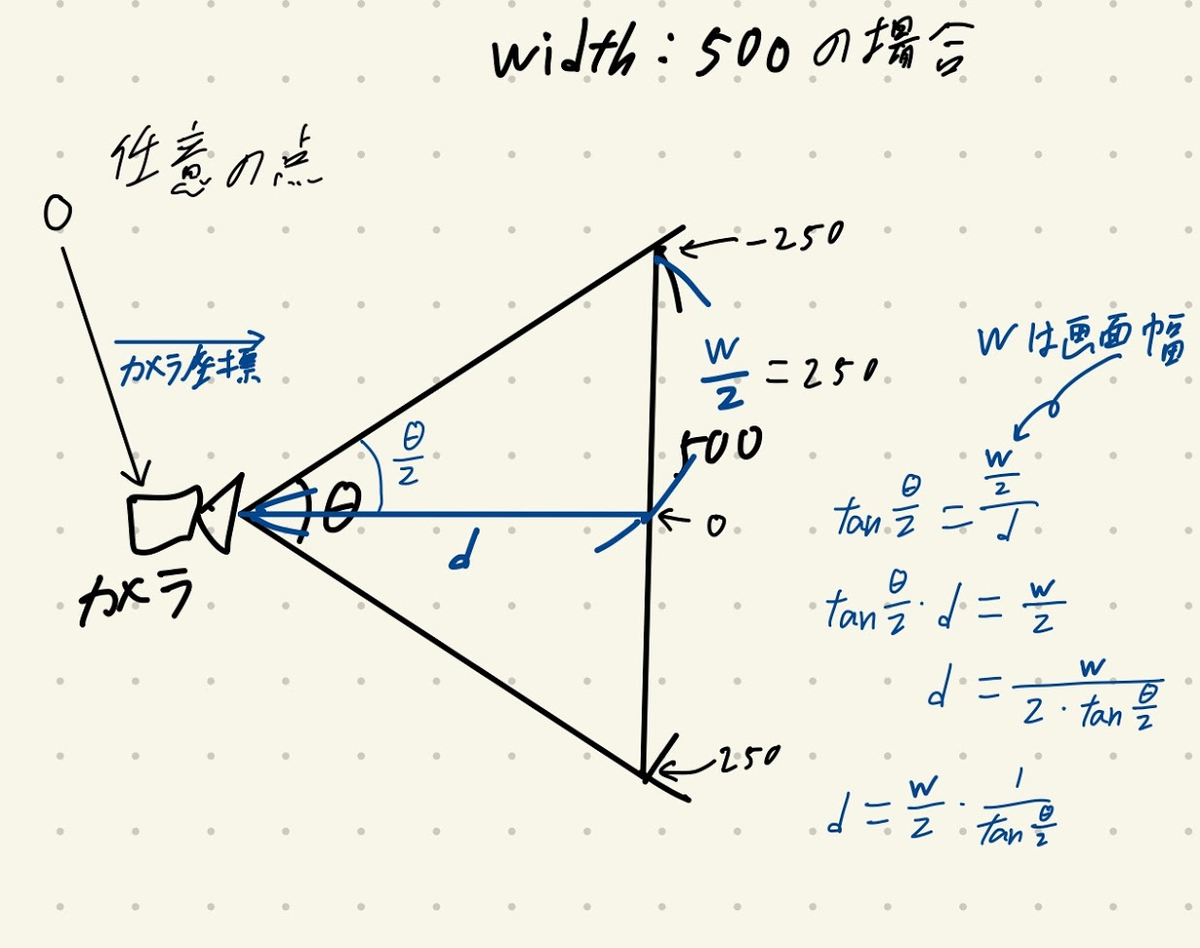
任意のFOVのためにカメラとスクリーンの距離を計算する
任意のFOVという仕様を満たすために, 与えられたFOVによってスクリーンとカメラを近づけたり離したりして任意のFOVを実現する.
これを行うためにスクリーンとカメラの間の距離
与えられたFOVを
イメージとしてはこんな感じ
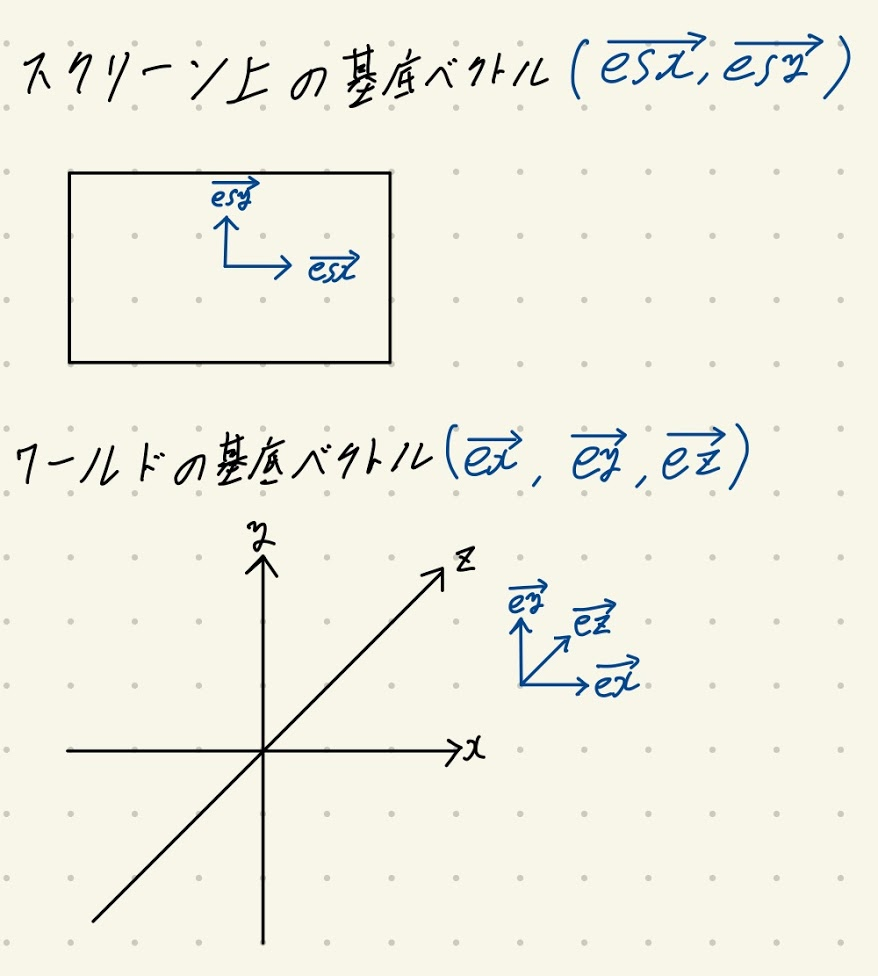
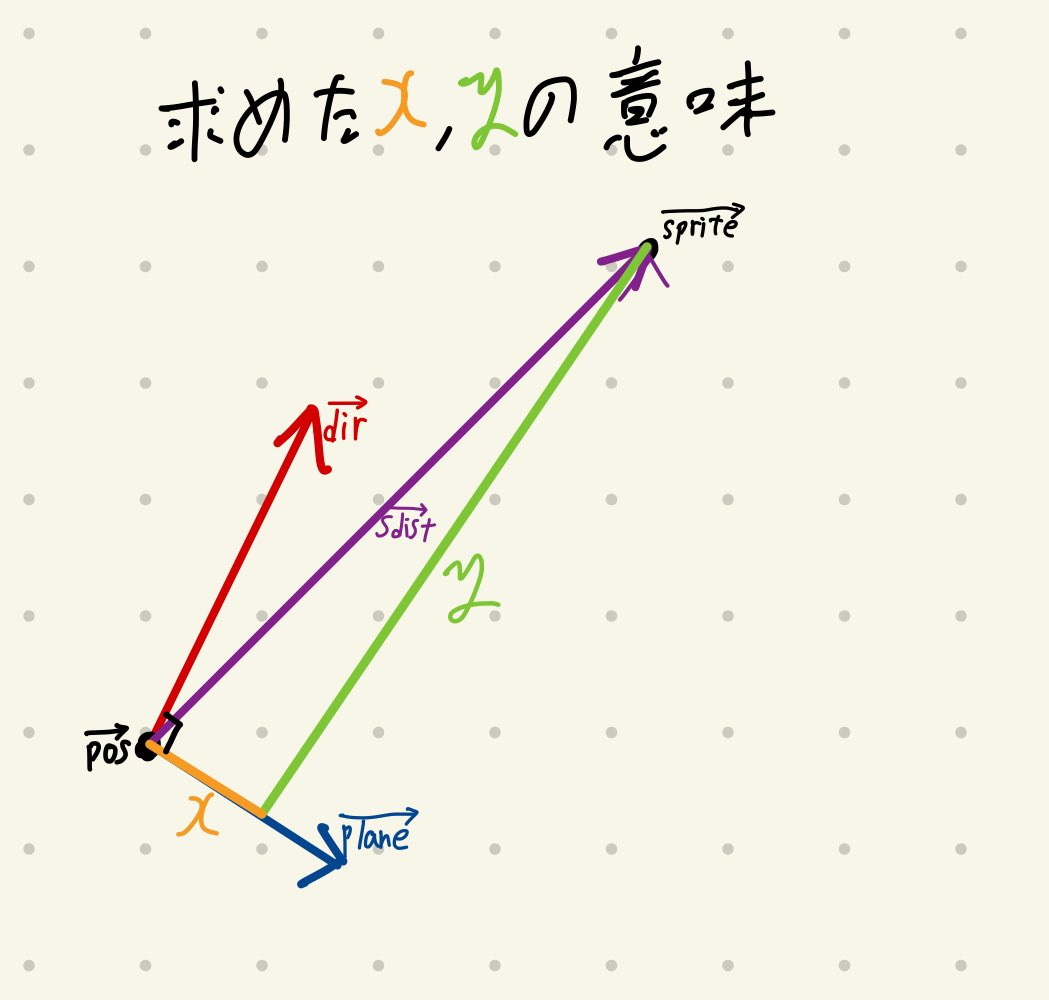
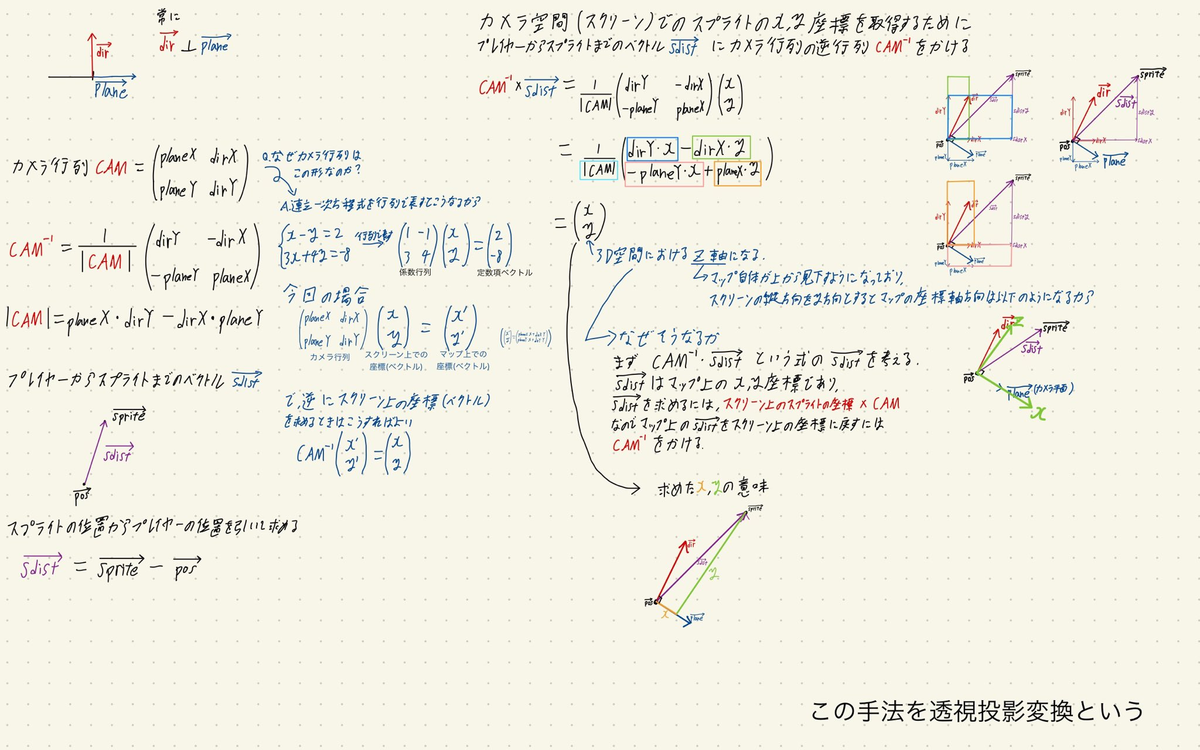
スクリーン座標の正規直交基底ベクトルを求める
ワールド座標からスクリーン座標へ変換するために, スクリーン座標の正規直交基底ベクトル
そもそもスクリーン世界のx,yとワールドのx,yは同じではありません. 正確には基底ベクトルが異なります.
スクリーン基底ベクトルとワールド基底ベクトル
これはカメラが真っ直ぐ前を向いていない(
カメラが座標
こういうわけなので, スクリーン座標とワールド座標を変換する処理が必要になります.
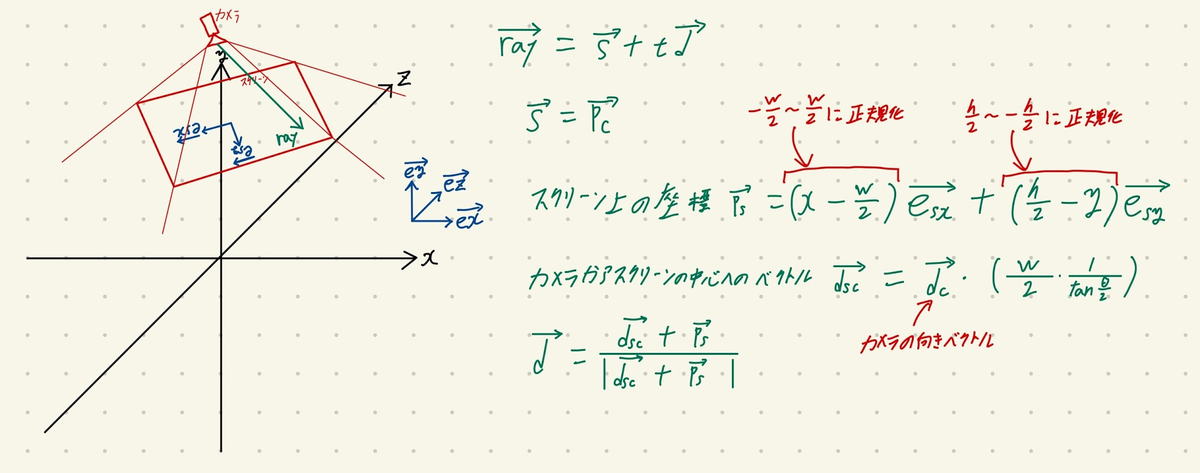
具体的には, レイはカメラの位置からスクリーンに向かってレイを飛ばす
ではどうやって変換するかというと, スクリーン基底ベクトル
スクリーン座標からワールド座標への変換を含むレイの式は以下のようになります.
スクリーン座標からワールド座標への変換を含むレイのベクトル方程式
上記の最終的な式を見てわかるかもしれませんが, 基本的にスクリーン基底ベクトル
というわけでここからスクリーン基底ベクトル
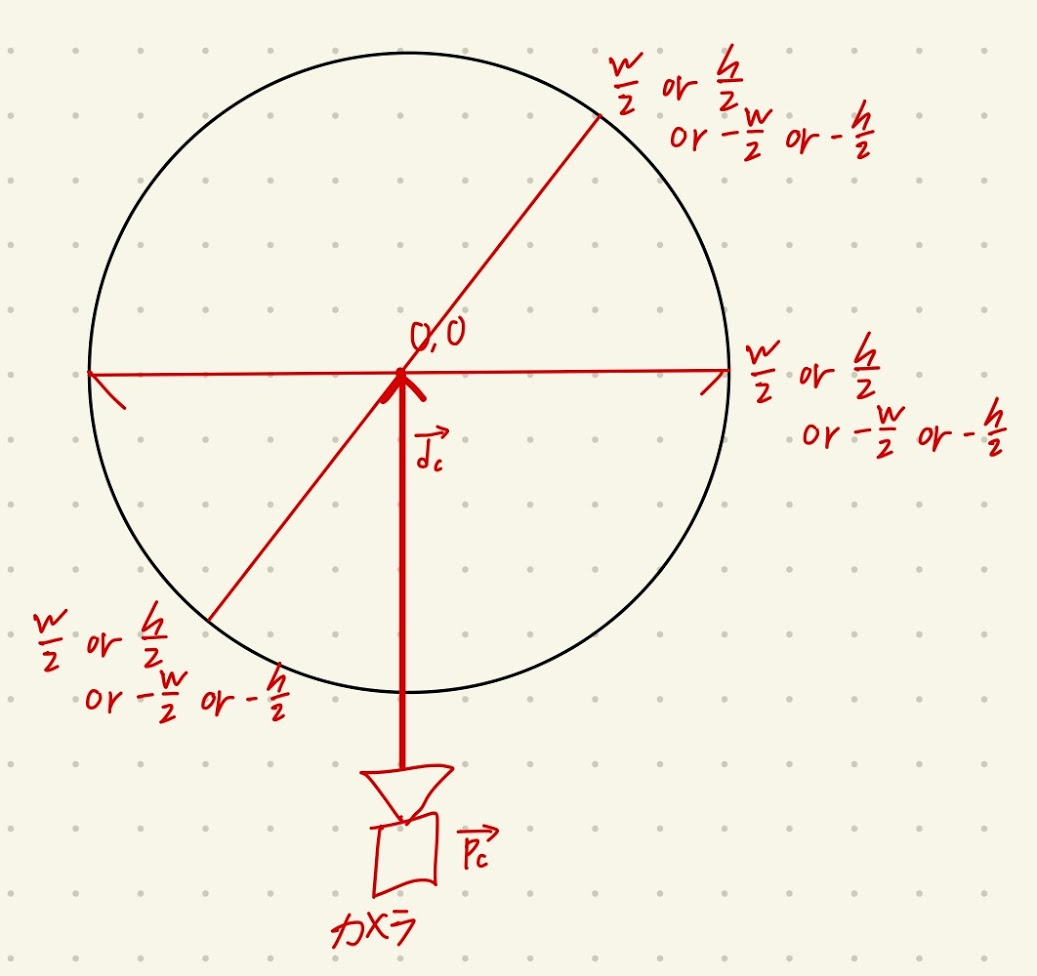
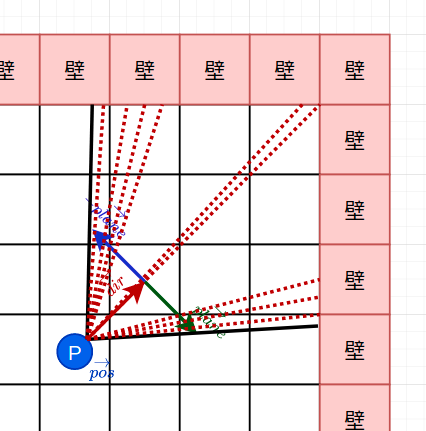
まず, 一つ知っておかねばならないのは, 今回の課題においてカメラに与えられるパラメータは 座標, 向き, FOV だけということです.
十分じゃね? って思うかも知れませんが, 注意せねばならないのは, 回転 が無いということです.
回転が与えられていないということはカメラは以下のように長方形に一意に決まらず, 円状になってしまうということです.
カメラの回転情報が与えられないのでスクリーンが一意に決まらない
じゃあどうするかというと, こちら側で都合の良いように勝手に決めてしまいます.
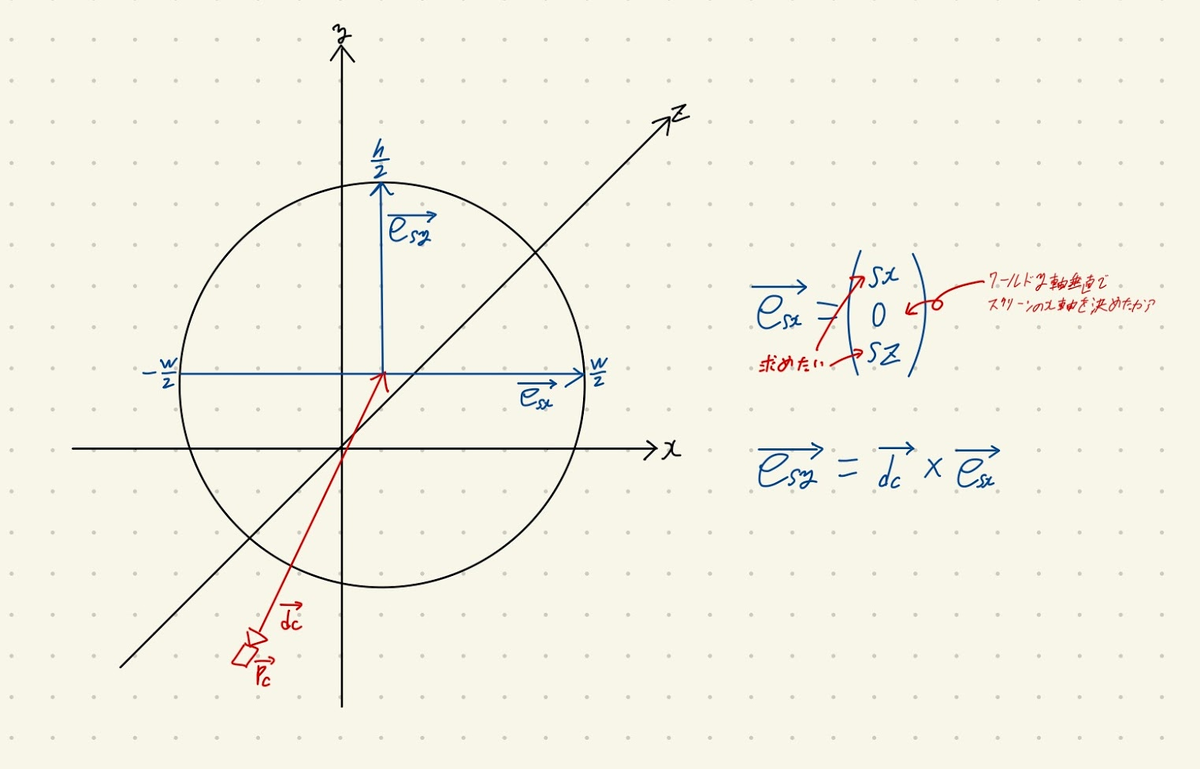
どういう風に決めれば都合が良いのかというのは人によって色々あるかもしれませんが, 今回自分はワールドのx軸に水平(もしくはy軸に垂直)として勝手に決めました.
y軸に垂直になるように勝手にスクリーンの回転を一意にして計算出来るようにした
ここから 外積 で求めることができます.
これで
③のマイナスの式を①の式に代入
これで
ようやく 外積 を取れば出てきます.
これでスクリーン基底ベクトル
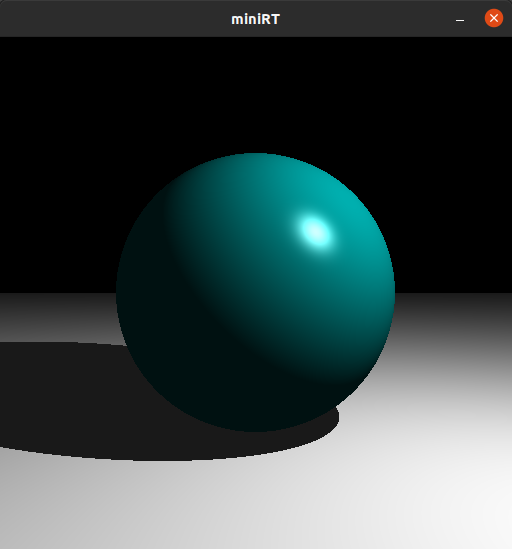
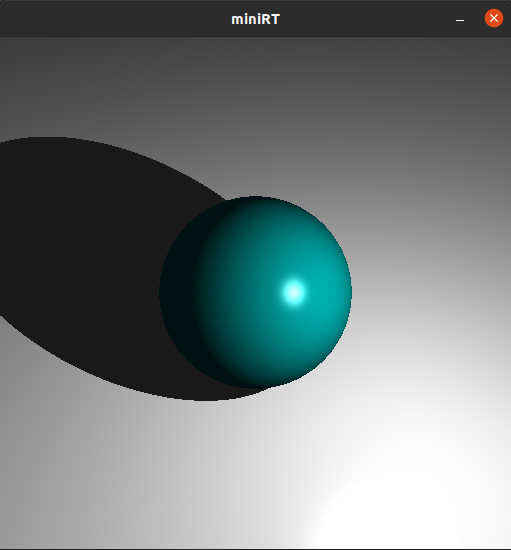
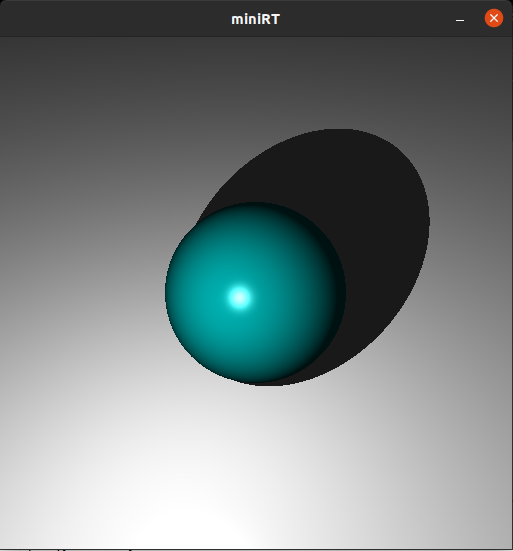
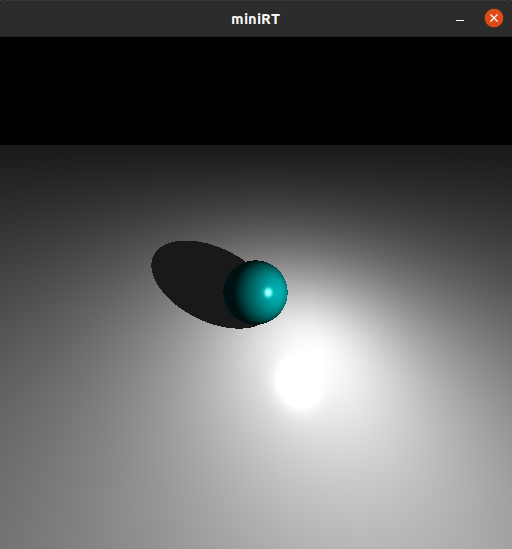
ここまで実装したら以下の画像のようにカメラの位置を自由に変えれるようになります.
同じワールドに対して様々な位置,向き,FOVのカメラを設定出来る
三角形平面(tr)
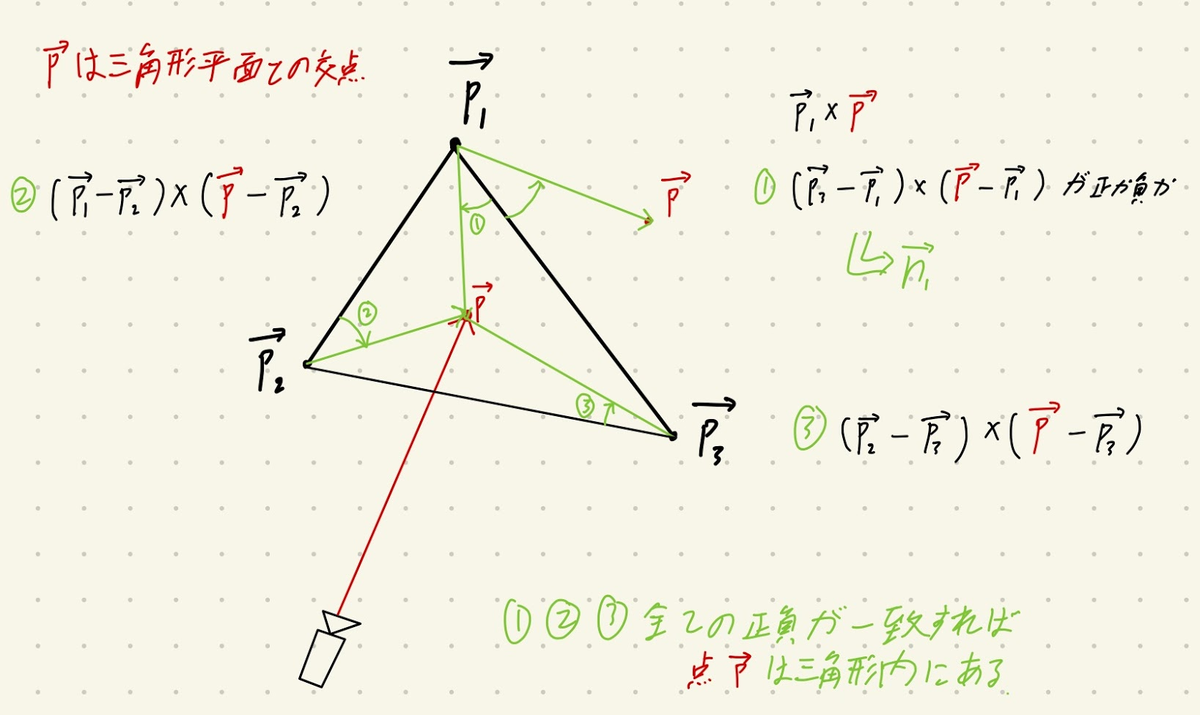
三角形平面は簡単です.
適当に三角形平面の法線ベクトルを外積 を使って求める.
三角形の内外判定というものを行う
www.thothchildren.com
三角形の内外判定
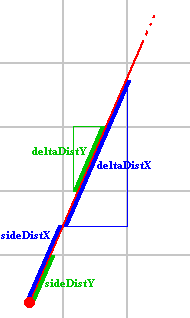
四角形平面(sq)
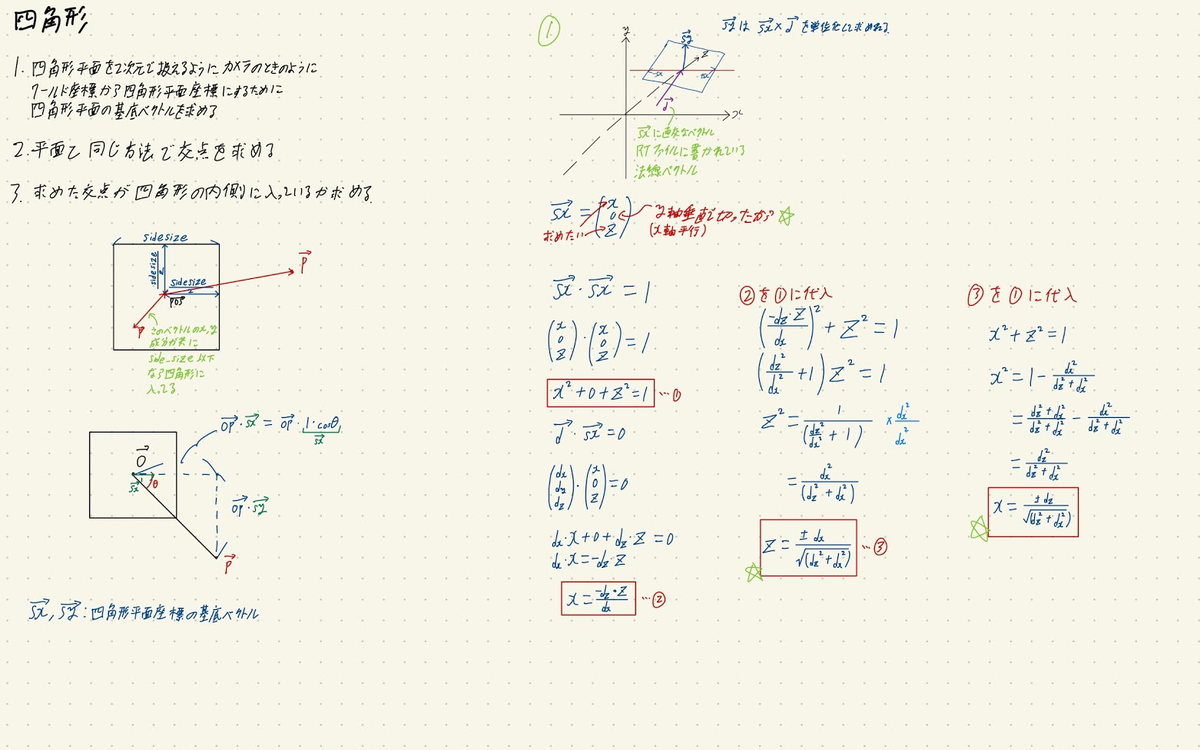
四角形平面を2次元で扱えるようにカメラの時と同様にワールド座標から四角形平面座標にするために四角形平面の基底ベクトルを求める
平面と同じ方法で交点を求める
求めた交点が四角形内に入っているか判定する
四角形平面の交差判定(変数とかがブログとは少し違うけど適当に読み替えてください)
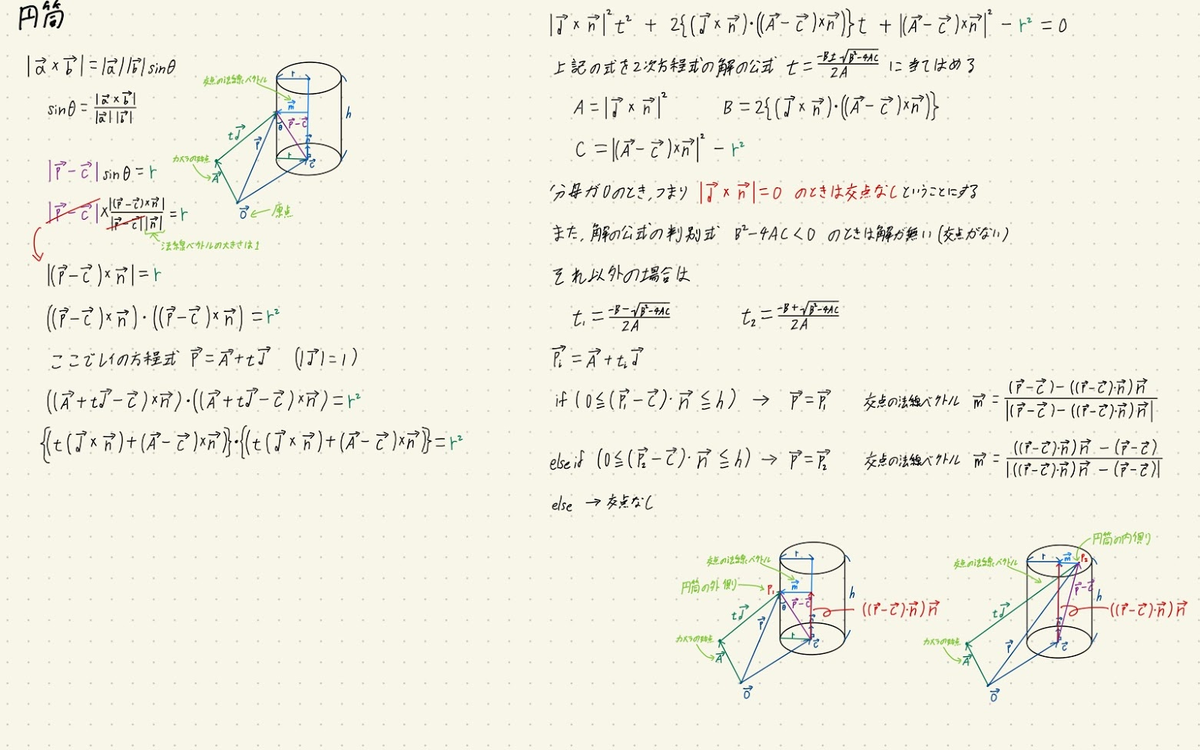
円筒(cy)
以下の画像に全て書いてます.
完走した感想
さて, 完走した感想(激ウマギャグ)ですが... 疲れたーーーーーーーーーーーーーーーーー.
miniRTの課題難しかったのでブログにまとめたいなぁと思ってまとめ始めましたが, くっっっっそ時間かかりました. ここまで書くのに14時間くらいかかりました. 疲れた.
まぁそれはともかく, 課題を完走した感想ですが, 最近流行りのレイトレーシング を自分でフルスクラッチ で書くという経験はとても楽しかったです. miniRTという課題名の通り最近のNvidia とかが出しているレイトレーシング の動画とかを見ると確かにminiなRayTraicingだなぁと思いました.
ここまで読めば解ると思いますが, とにかく数学だらけ(特にベクトル)で大変でした. 久しぶり過ぎてベクトルの外積 とか調べ直してなんとか思い出して実装できました. また, 数式をコード化する作業中にバグを踏むと数式が間違っているかコードが間違っているかわからなくなりデバッグ がめっちゃ大変でした.
また, 今回多くの実装は東京電機大学の資料 を参考にさせて貰いました. また, カメラや円筒の実装は42の学生に教えてもらいながら実装しました. 東京電機大学 , 及び42Tokyoの教えてくれた学生の皆さんありがとうございました.
というわけで, miniRTの解説記事でした.
では今日はこのへんで. ではでは〜〜👋👋
参考にしたサイト
knzw.tech
www.dropbox.com








![[試して理解]Linuxのしくみ ~実験と図解で学ぶOSとハードウェアの基礎知識](https://m.media-amazon.com/images/I/51CPvtuv+wL.jpg "[試して理解]Linuxのしくみ ~実験と図解で学ぶOSとハードウェアの基礎知識")






{kind=link}